
hayabusa2 mission parts quotation
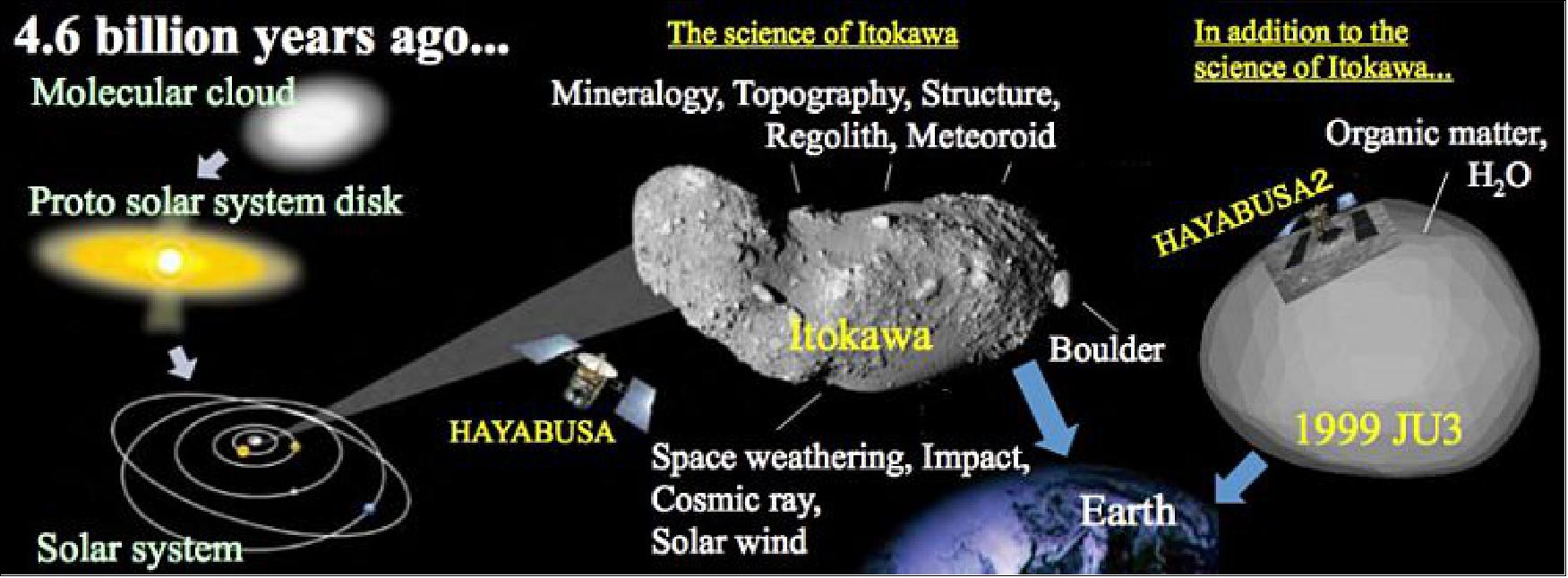
Hayabusa2asteroid sample-return mission operated by the Japanese state space agency JAXA. It is a successor to the Hayabusa2 was launched on 3 December 2014 and rendezvoused in space with near-Earth asteroid 162173 Ryugu on 27 June 2018.UTC.
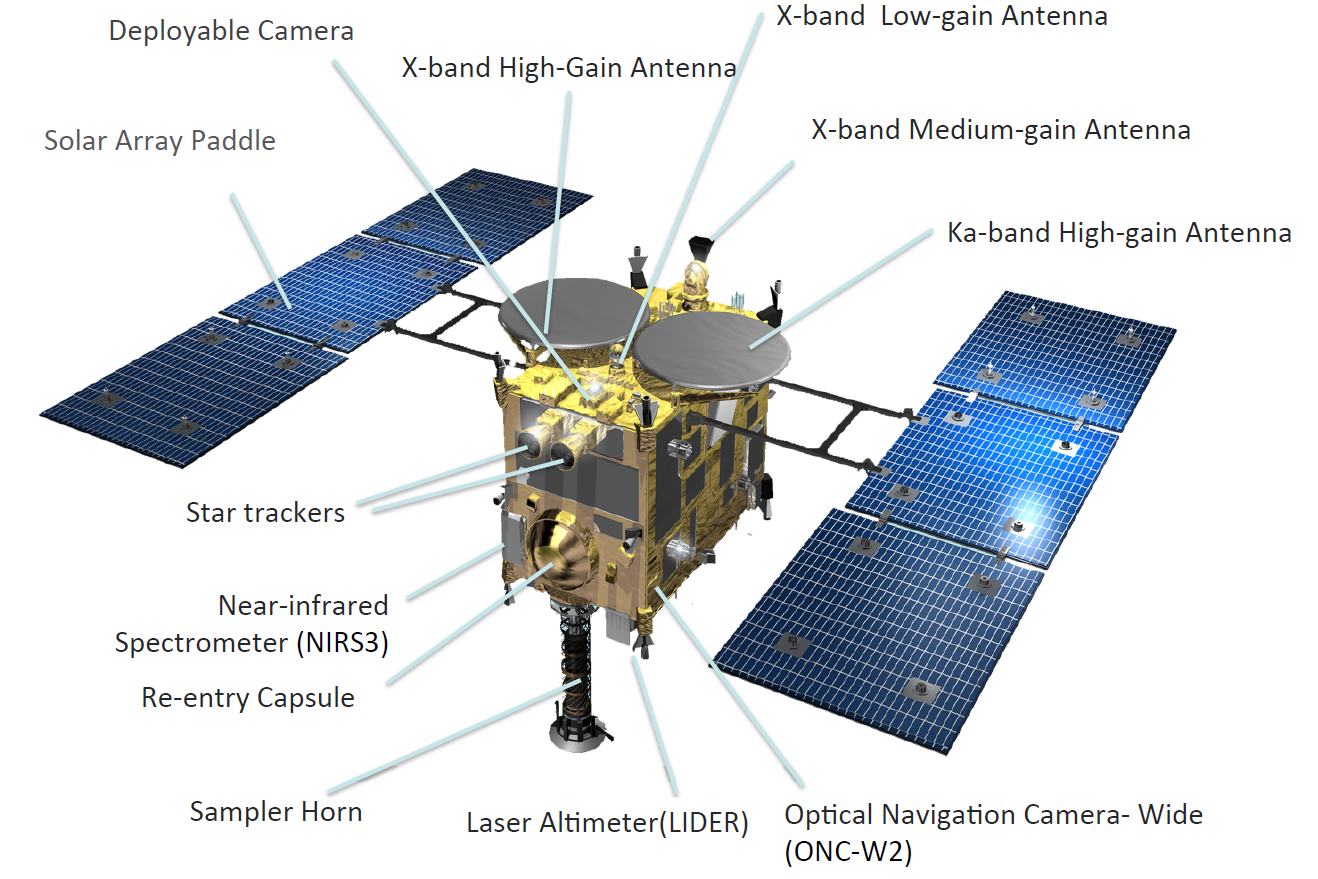
Hayabusa2 carries multiple science payloads for remote sensing and sampling, and four small rovers to investigate the asteroid surface and analyze the environmental and geological context of the samples collected.
Initially, launch was planned for 30 November 2014,H-IIA launch vehicle.Hayabusa2 launched together with PROCYON asteroid flyby space probe. PROCYON"s mission was a failure. Hayabusa2 arrived at Ryugu on 27 June 2018,
Following the initial success of Hayabusa, JAXA began studying a potential successor mission in 2007.Hayabusa2. The cost of the project estimated in 2010 was 16.4 billion yen (US$149 million).
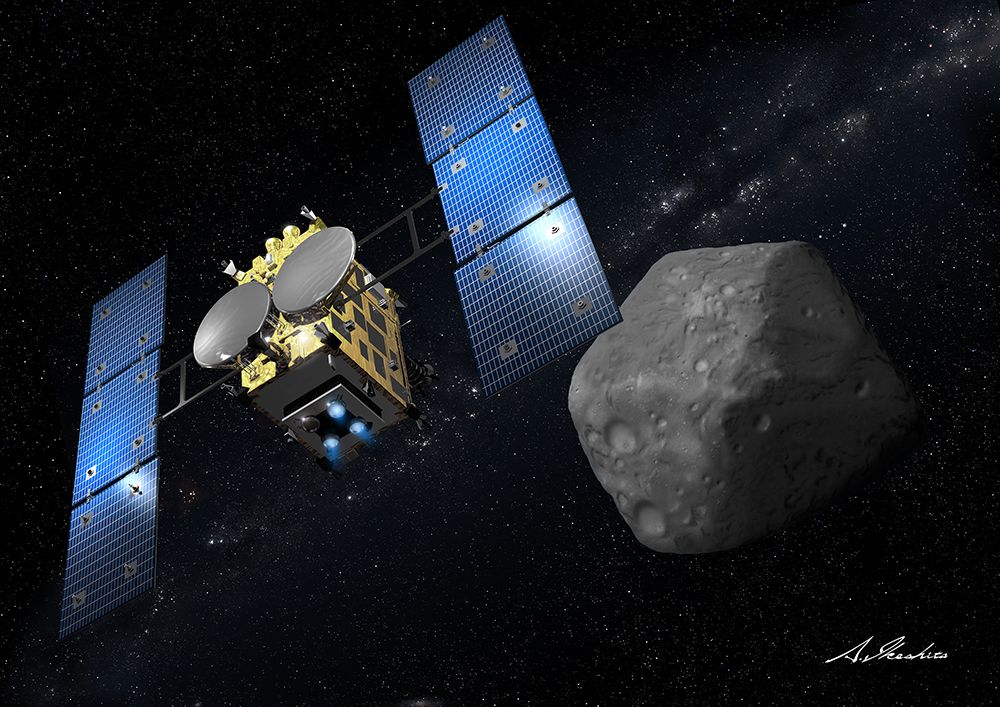
Hayabusa2 was launched on 3 December 2014, arrived at asteroid Ryugu on 27 June 2018, and remained stationary at a distance of about 20 km (12 mi) to study and map the asteroid. In the week of 16 July 2018, commands were sent to move to a lower hovering altitude.
The first sample collection was scheduled to start in late October 2018, but the rovers encountered a landscape with large and small boulders but no surface soil for sampling. Therefore, it was decided to postpone the sample collection plans to 2019 and further evaluate various options for the landing.Hayabusa2 released an impactor to create an artificial crater on the asteroid surface. However, Hayabusa2 initially failed on 14 May 2019 to drop special reflective markers necessary onto the surface for guiding the descent and sampling processes,JST), dropping the contents by parachute in a special container at a location in southern Australia. The samples were retrieved the same day for secure transport back to the JAXA labs in Japan.
The design of Hayabusa2 is based on the first Hayabusa spacecraft, with some improvements.solar arrays with an output of 2.6 kW at 1 AU, and 1.4 kW at 1.4 AU.lithium-ion batteries.
Hayabusa2 carried four small rovers to explore the asteroid surface MINERVA-II-2, failed before release from the orbiter. It was released on 2 October 2019 to orbit the asteroid and perform gravitational measurements before being allowed to impact the asteroid a few days later.
MASCOT was deployed 3 October 2018. It had a successful landing and performed its surface mission successfully. Two papers were published describing the results from MASCOT in the scientific journals C-type asteroids consist of more porous material than previously thought, explaining a deficit of this meteorite type. Meteorites of this type are too porous to survive the entry into the atmosphere of planet Earth. Another finding was that Ryugu consists of two different almost black types of rock with little internal cohesion, but no dust was detected.Journal of Geophysical Research and describes the magnetic properties of Ryugu, showing that Ryugu does not have a magnetic field on a boulder scale.
The first two surface samples were scheduled to start in late October 2018, but the rovers showed large and small boulders and insufficient surface area to sample, so the mission team decided to postpone sampling to 2019 and evaluate various options.
Hayabusa2"s sampling device is based on Hayabusa"s. The first surface sample retrieval was conducted on 21 February 2019, which began with the spacecraft"s descent, approaching the surface of the asteroid. When the sampler horn attached to Hayabusa2"s underside touched the surface, a 5 g (0.18 oz) tantalum projectile (bullet) was fired at 300 m/s (980 ft/s) into the surface.
The sub-surface sample collection required an impactor to create a crater in order to retrieve material under the surface, not subjected to space weathering. This required removing a large volume of surface material with a powerful impactor. For this purpose, Hayabusa2 deployed on 5 April 2019 a free-flying gun with one "bullet", called the Small Carry-on Impactor (SCI); the system contained a 2.5 kg (5.5 lb) copper projectile, shot onto the surface with an explosive propellant charge. Following SCI deployment, Hayabusa2 also left behind a deployable camera (DCAM3)
Replica of Hayabusa"s sample-return capsule (SRC) used for re-entry. Hayabusa2"s capsule is of the same size, measuring 40 cm (16 in) in diameter and using a parachute for touchdown.
At the end of the science phase in November 2019,Hayabusa2 used its ion engines for changing orbit and return to Earth.Hayabusa2 flew past Earth in late 2020, it released the capsule, on 5 December 2020 at 05:30 UTC.Woomera Test Range in Australia.×10^9 km (35.0 AU).
With the successful return and retrieval of the sample capsule on 6 December 2020 (JST), Hayabusa2 will now use its remaining 30 kg (66 lb) of xenon propellant (from the initial 66 kg (146 lb)) to extend its service life and fly out to explore new targets.2001 CC21 will be a high-speed fly-by of the L-type asteroid, a relatively uncommon type of asteroid.Hayabusa2 was not designed for this type of fly-by. The rendezvous with 1998 KY26 will be the first visit of a fast rotating micro-asteroid, with a rotation period of about 10 minutes.exoplanets.Venus flyby to set up an encounter with
The nickname of the Extended Mission is “Hayabusa2♯” (read “Hayabusa2 Sharp”). The character “♯” is a musical symbol that means “raise the note by a semitone”, and for this mission, it is also the acronym for “Small Hazardous Asteroid Reconnaissance Probe”. This name indicates that the Hayabusa2 Extended Mission is set to investigate small but potentially dangerous asteroids that may collide with the Earth in the future. The English meaning of the word “sharp” also highlights the extremely challenging nature of this mission, which is also reflected in the musical meaning of “raise the note by a semitone”, suggestive of raising of the rank of the mission.
As the character “♯” is a musical symbol, it can be difficult to enter in practice when typing. The symbol can therefore be substituted for the “#” symbol (number sign / pound / hash) that is on computer keyboards or phones. There is no problem with the notation “Hayabusa2♯” (musical symbol) or “Hayabusa2#”.
Tachibana, S.; Abe, M.; Arakawa, M.; Fujimoto, M.; Iijima, Y.; Ishiguro, M.; Kitazato, K.; Kobayashi, N.; Namiki, N.; Okada, T.; Okazaki, R.; Sawada, H.; Sugita, S.; Takano, Y.; Tanaka, S.; Watanabe, S.; Yoshikawa, M.; Kuninaka, H. (2014). "Hayabusa2: Scientific importance of samples returned from C-type near-Earth asteroid (162173) 1999 JU3". Geochemical Journal. 48 (6): 571–587. Bibcode:2014GeocJ..48..571T. doi:10.2343/geochemj.2.0350.
Yuichi Tsuda; Makoto Yoshikawa; Masanao Abe; Hiroyuki Minamino; Satoru Nakazawa (October–November 2013). "System design of the Hayabusa 2 – Asteroid sample return mission to 1999 JU3". Acta Astronautica. 91: 356–362. Bibcode:2013AcAau..91..356T. doi:10.1016/j.actaastro.2013.06.028.
Makoto Yoshikawa (6 January 2011). 小惑星探査ミッション「はやぶさ2 [Asteroid Exploration Mission "Hayabusa2"] (PDF) (in Japanese). 11th Symposium on Space Science. Retrieved 20 February 2011.
Operation Status of Ion Engines of Asteroid Explorer Hayabusa2, Nishiyama, Kazutaka; Hosoda, Satoshi; Tsukizaki, Ryudo; Kuninaka, Hitoshi; JAXA, January 2017
The Ion Engine System for Hayabusa2 Archived 6 November 2014 at the Wayback Machine, The 32nd International Electric Propulsion Conference, Wiesbaden, Germany, September 11–15, 2011
Kameda, S.; Suzuki, H.; Takamatsu, T.; Cho, Y.; Yasuda, T.; Yamada, M.; Sawada, H.; Honda, R.; Morota, T.; Honda, C.; Sato, M.; Okumura, Y.; Shibasaki, K.; Ikezawa, S.; Sugita, S. (2017). "Preflight Calibration Test Results for Optical Navigation Camera Telescope (ONC-T) Onboard the Hayabusa2 Spacecraft". Space Science Reviews. 208 (1–4): 17–31. Bibcode:2017SSRv..208...17K. doi:10.1007/s11214-015-0227-y. S2CID 255069232.
Terui, Fuyuto; Tsuda, Yuichi; Ogawa, Naoko; Mimasu, Yuya (July 2014). 小惑星探査機「はやぶさ2」の航法誘導制御における自動・自律機 [Autonomy for Guidance, Navigation and Control of Hayabusa2] (PDF). Artificial Intelligence (in Japanese). 29 (4). ISSN 2188-2266. Retrieved 9 July 2018.
Okada, Tatsuaki; Fukuhara, Tetsuya; Tanaka, Satoshi; Taguchi, Makoto; Imamura, Takeshi; Arai, Takehiko; Senshu, Hiroki; Ogawa, Yoshiko; Demura, Hirohide; Kitazato, Kohei; Nakamura, Ryosuke; Kouyama, Toru; Sekiguchi, Tomohiko; Hasegawa, Sunao; Matsunaga, Tsuneo (July 2017). "Thermal Infrared Imaging Experiments of C-Type Asteroid 162173 Ryugu on Hayabusa2". Space Science Reviews. 208 (1–4): 255–286. Bibcode:2017SSRv..208..255O. doi:
Yoshimitsu, Tetsuo; Kubota, Takashi; Tsuda, Yuichi; Yoshikawa, Makoto. "MINERVA-II1: Successful image capture, landing on Ryugu and hop!". JAXA Hayabusa2 Project. JAXA. Retrieved 24 September 2018.
Yoshimitsu, Tetsuo; Kubota, Takashi; Tomiki, Atsushi; Yoshikaw, Kent (24 October 2019). Operation results of MINERVA-II twin rovers onboard Hayabusa2 asteroid explorer (PDF). 70th International Astronautical Congress. International Astronautical Federation. Retrieved 25 January 2020.
Ho, Tra-Mi; et al. (2017). "MASCOT—The Mobile Asteroid Surface Scout Onboard the Hayabusa2 Mission". Space Science Reviews. 208 (1–4): 339–374. Bibcode:2017SSRv..208..339H. doi:10.1007/s11214-016-0251-6. S2CID 255067977.
Grott, M.; Knollenberg, J.; Borgs, B.; Hänschke, F.; Kessler, E.; Helbert, J.; Maturilli, A.; Müller, N. (1 August 2016). "The MASCOT Radiometer MARA for the Hayabusa 2 Mission". Space Science Reviews. 208 (1–4): 413–431. Bibcode:2017SSRv..208..413G. doi:10.1007/s11214-016-0272-1. S2CID 118245538.
Saiki, Takanao; Sawada, Hirotaka; Okamoto, Chisato; Yano, Hajime; Takagi, Yasuhiko; Akahoshi, Yasuhiro; Yoshikawa, Makoto (2013). "Small carry-on impactor of Hayabusa2 mission". Acta Astronautica. 84: 227–236. Bibcode:2013AcAau..84..227S. doi:10.1016/j.actaastro.2012.11.010.
Sarli, Bruno Victorino; Tsuda, Yuichi (2017). "Hayabusa2 extension plan: Asteroid selection and trajectory design". Acta Astronautica. 138: 225–232. Bibcode:2017AcAau.138..225S. doi:10.1016/j.actaastro.2017.05.016.
"はやぶさ2、再び小惑星へ 地球帰還後も任務継続―対象天体を選定へ・JAXA" [Hayabusa2 will explore another asteroid, continuing mission after returning target sample to Earth] (in Japanese). Jiji Press. 9 January 2020. Retrieved 9 January 2020.

TOKYO/MELBOURNE (Reuters) - Japan has retrieved a capsule of asteroid dust from Australia’s remote outback after a six-year mission that may help uncover more about the origins of the planets and water, the Asian nation’s space agency said on Sunday.
The mission of the Japanese spacecraft, Hayabusa2, spotlights Asia’s growing role in space exploration, with a Chinese robotic vehicle collecting lunar samples last week for the first time since the 1970s.
After delivering the capsule containing a sample from asteroid Ryugu to Earth on December 6, 2020, the Hayabusa2 spacecraft began a new adventure. This additional journey is called the “Hayabusa2 Extended Mission”. As this new mission begins, the original “Hayabusa2 Project” has drawn to a close. With the work for the first mission now complete, the Hayabusa2 Project was dissolved at the end of June 2022, and will be taken over by the Extended Mission. On this occasion, we would like to announce the nickname and logo design for the Hayabusa2 Extended Mission.
The nickname of the Extended Mission is “Hayabusa2♯”, read “Hayabusa2 Sharp”. The character “♯” is a musical symbol that means “raise the note by a semitone”, and for this mission, it is also the acronym for “Small Hazardous Asteroid Reconnaissance Probe”. This name indicates that the Hayabusa2 Extended Mission is set to investigate small but potentially dangerous asteroids that may collide with the Earth in the future. The English meaning of the word “sharp” also highlights the extremely challenging nature of this mission, which is also reflected in the musical meaning of “raise the note by a semitone”, suggestive of raising of the rank of the mission.
As the character “♯” is a musical symbol, it can be difficult to enter in practice when typing. The symbol can therefore be substituted for the “#” symbol (number sign / pound / hash) that is on computer keyboards or phones. There is no problem with the notation “Hayabusa2♯” (musical symbol) or “Hayabusa2#”.
The logo depicts the spacecraft departing Earth and heading on a journey to explore two asteroids, 2001 CC21 and 1998 KY26. In addition to spacecraft operations, the Hayabusa2 Extended Mission will conduct three activities: “joint scientific analysis of samples from Hayabusa2 and NASA’s OSIRIS-REx”, “ready curation facilities to accept the OSIRIS-REx sample”, and “widely disseminate Hayabusa2 science results to the international community”. The four trajectories on the logo show how these activities interact as they proceed. The background shows the sharp character in the form of a star, with the four sharp star shapes also indicating the spacecraft operations with the three activities.

Context. Starting from late June 2018, the JAXA asteroid sample return mission Hayabusa2 acquired a large quantity of resolved images and spectra of the surface of the asteroid (162173) Ryugu.
The Hayabusa2 JAXA asteroid sample return mission was launched on December 3, 2014 and recently arrived to the primitive asteroid (162173) Ryugu after 3.5 yr of cruise. On June 27, 2018 the spacecraft was set at 20 km from Ryugu’s surface (called “home position”) hovering the asteroid in order to start the initial mapping phase. At that time the Hayabusa2 mission acquired a very large number of resolved images and spectra of the asteroid surface. The on-board instruments reveal Ryugu as a top-shape body characterized by an equatorial ridge with a radius of 502 ± 2 m, and a very low density of 1190 ± 3 kg m−3. This implies porosity larger than 50% and a rubble-pile nature (Watanabe et al. 2019). Ryugu presents a very dark surface with the visible geometric albedo of 0.045 ± 0.002 (Sugita et al. 2019).
We used the ONC-T data obtained on July 12, 2018 at 20 km altitude, which have almost global coverage at a resolution of 2 m pixel−1. We used the normalized reflectance measured in the seven broadband filters (ul = 397.5 nm; b = 479.8 nm; v = 548.9 nm, n = 589.9 nm; w = 700.1 nm; x = 857.3 nm; and p = 945.1 nm) with calibration and errors as reported by Tatsumi et al. (2019). The data have been coregistered as described by Honda et al. (2018, 2019) and photometrically corrected following the Hapke photometric model obtained for ONC-T v-filter images combined with ground-based observations as described by Sugita et al. (2019). Since the model parameters for the other band filters are still under examination (Domingue et al. 2019), the other filter images are also calibrated using this single photometric model. The data with emission and incidence angles larger than 50° have been eliminated to avoid shadow effects. Then the mean value of a 5 × 5 pixel area (about 10 × 10 m) is calculated to reduce noise. The ONC-T data were also analyzed by Honda et al. (2019) using different clustering methods.
The average spectral behavior of the six identified groups, presented in Fig. 1b, shows a band at 487 nm, a drop of the reflectance at 945 nm, and quite flat spectra with slopes between these two wavelengths, ranging from 0.011 to 0.021%/nm.The two larger groups (numbers 1 and 2, in Fig. 1b) are those already found at the 3σ confidence level conserving the same spectrophotometric behavior. However, several objects have migrated from the larger group (#1 in Fig. 1a) to double the population of the smaller one (#2, which now includes about 5% of the objects) and to form four new small groups (containing each around 1% of the objects) and reported in Fig. 1b. These new small groups are very well defined, following the very small value of their standard deviation and they may represent some specific characters of the asteroid surface. The new groups #3 and #5 are distinguished for the values between 397, 479, and 590 nm, but, being redder, have the same slope trend in the range 700 and 947 nm. Group #4 has the same behavior as #1 in the red part, but is very different in the ultraviolet, both the blue and visible parts, having the deepest band at 487 nm. Group #6 is the bluest and has a negative spectral slope.
Comparing the obtained results with those of October 30 when the Hayabusa2 spacecraft was much closer and the spatial resolution of the obtained spectra was about 10 m px−1, the same results are obtained at 3σ confidence level with the two groups (Fig. 5e). However, at 2σ only three classes are obtained (Fig. 5f): group #2 with its redder spectra is almost concentrated in the same areas (west and south) as the previous NIRS3 data analyzed, while group #3 with its bluer spectra appears in different areas around the equatorial surface. The phase angle of these observations was smaller then the previous one from July, but no effect has been detected on spectral slope variations with changes of phase angles. This is in good agreement with Perna et al. (2018) who found, on the basis of a large asteroid observational survey, that the effect of phase reddening on low-albedo asteroid spectra is negligible.
Moreover, the obtained results show a clear spectral dichotomy both between the eastern and western hemispheres and between thenorthern and southern hemispheres. From our results, the parts of surface represented in the maps with orange and red colors and localized on the southwestern hemisphere could be connected to the presence of small sized regolith grains. The former dichotomy is also discussed by Sugita et al. (2019) on the basis of the image geomorphological interpretation. The surface spectral variations we found here can give constrains on the re-accumulation phase of the present rubble-pile body after the catastrophic disruption of the parent asteroid (Michel et al. 2015).
Hayabusa2 is still working and some specific areas will have very detailed data both with ONC-T and NIRS3 instruments. We will also have imaging data of the sampling sites at very high resolution and more detailed analysis putting together available data of all the instruments will allow better interpretation of Ryugu’s surface characteristics.
We thank the Haybusa2 JAXA team for their efforts in making the mission successful. Hayabusa2 was developed and built under the leadership of JAXA, with contributions from the DLR and the CNES, and in collaboration with NASA, Nagoya University, University of Tokyo, National Astronomical Observatory of Japan, Aizu University, Kobe University, and other universities, institutes, and companies in Japan. We would also wish to thank all the engineers who contributed to the success of the Hayabusa2 mission, especially T. Masuda, S. Yasuda, K. Matsushima, and T. Ohshima. This study was supported by JSPS International Planetary Network. M.A.B., P.H., J.D.P.D., and M.F. acknowledge funding support from the CNES. D.P. has received funding from the European Union’s Horizon 2020 research and innovation program under the Marie Sklodowska-Curie actions (grant agreement no. 664931).
For those of you who’ve been asking, I think the best way to keep up with the Hayabusa2 mission to asteroid Ryugu is via Twitter, @haya2e_jaxa. The news continues to percolate via websites and various publications, with a sustained ripple when the spacecraft successfully tested its sample mechanism and touched down on the asteroid. I’ll remind you too that the mission team now offers updated systems information in English on its Haya2NOW page for obsessives like me who want a really fine-grained look at what’s going on.
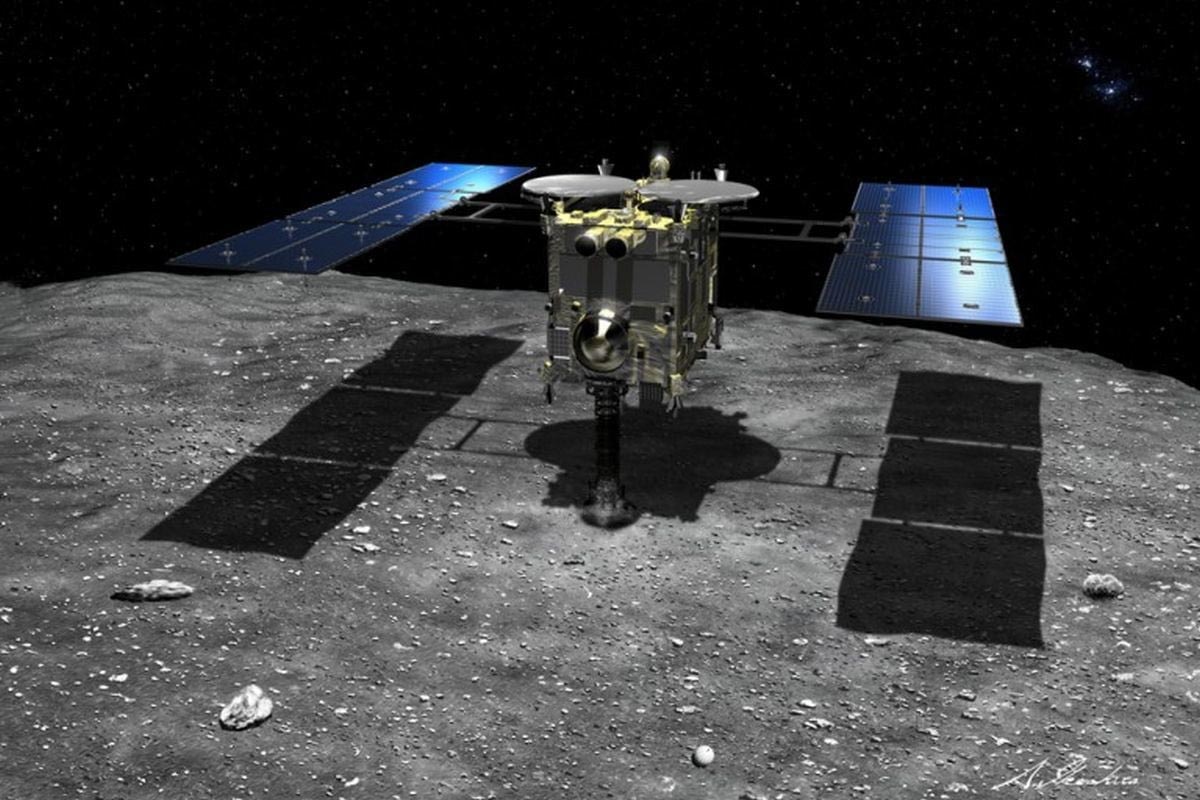
National Research and Development Agency Japan Aerospace Exploration Agency (JAXA) executed the asteroid explorer Hayabusa2 operation to touch down the surface of the target asteroid Ryugu for sample retrieval.
Data analysis from Hayabusa2 confirms that the sequence of operation proceeded, including shooting a projectile into the asteroid to collect its sample material. The Hayabusa2 spacecraft is in nominal state. This marks the Hayabusa2 successful touchdown on Ryugu.
and photos like the one below, which was sent out to thank worldwide supporters for their thoughts and encouragement. Look at the size of the Hayabusa2 team! Congratulations to all of you.
Upon touchdown within the 6-meter circle selected on the asteroid, the spacecraft fired a tantalum ‘bullet’ into the surface to drive particles outward that the sampling instrument could collect. The craft then rose again, as vividly attested in the photo below, where its shadow is obvious. Two more samples are to be taken before Hayabusa 2 departs the asteroid, the final sampling involving a larger crater deliberately blasted into the asteroid to probe sub-surface materials.
The plan is for Hayabusa2 to depart Ryugu in December of this year, with return to Earth toward the end of 2020. Assuming a successful sample return, Hayabusa2 will mark the first time samples from a C-type (carbonaceous) asteroid — the most common, constituting 75% of those known — have been returned to Earth. Naturally we’ll also keep an eye on OSIRIS-REx and its operations at 101955 Bennu, another carbonaceous asteroid, for both sample returns should give us a window into early building blocks of our planet. The OSIRIS-REx sample return is scheduled for 2023.

MicrOmega is divided into two main parts: (1) the MicrOmega Sensor Unit (MSU) with the illumination, detection and proximity electronics parts and (2) the MicrOmega Electronic Unit (MEU) inside the MASCOT E-box (see Sect. 2.2.3) (Fig. 1).
The sensor is the space qualified Sofradir Neptune SMW made of a HgCdTe detection array, hybridized on a CMOS CTIA readout circuit. The array has a size \(500\times256~\mbox{px}^{2}\) and a 30 μm pixel pitch; for this mission, only the central area of \(125\times 128~\mbox{px}^{2}\) is used. The HgCdTe spectral sensitivity has been tuned to cover the 0.9 to 3.7 μm spectral range. It operates at 110 K nominally with a resulting dark current of 10 fA/px. The well depth is estimated at \(2.2 10^{6}~\mbox{e}^{-}\mbox{/px}\). The detector is encapsulated in a hermetic Dewar, within which it is mounted on the cold part of a dedicated Ricor K508S cryocooler (with a temperature closed loop control system). Within the Dewar, a baffle, coupled to be cooled by the cryocooler, is placed in front of the detector, to strictly limit the thermal fluxes entering the detector to those coming from the samples.
Electronic functions are implemented on two boards with separated functions; one board is implemented inside the MASCOT common E-box (MicrOmega Electronic Unit /MEU) while the second (MicrOmega Proximity Electronic) is implemented inside the MSU. The MicrOmega Electronic Unit provides simple power interface between MASCOT PCDU and the instrument, the SpaceWire/data interface (nominal and redundant link) and the control of all electrical subsystems of MSU. It also manages some simple data processing and a stand-alone test mode. The MicrOmega Proximity Electronic is mounted inside the MSU, close to the analog parts of the instrument (detector, temperature sensors), to minimize the potential perturbations. There are 3 interconnect harnesses (MIH), under DLR responsibility, between MASCOT E-box and MSU. Most of lines inside these harnesses are digital lines or power lines.
The Radio Frequency Synthesizer (RFS) is also implemented within the MSU. It generates a radio frequency signal in the 27–104 MHz range, which controls the AOTF transducers, as described above. The 20 kHz frequency step enables to scan the light wavelength within the 0.99–3.65 μm (\(10101\mbox{--}2740~\mbox{cm}^{-1}\)) range with \(2~\mbox{cm}^{-1}\) steps. The typical RF output power is \(2.0~\mbox{W} \pm 0.5~\mbox{W}\) for a power consumption \(< 5~\mbox{W}\). The use of two transducers for the AOTF enables to keep a good impedance match over the whole RF frequency range; the VSWR (voltage standing wave ratio), which characterizes the power transmission to the AOTF, remains below 1.15.
To insure optimization at system level, the MicrOmega instrument has a very limited data handling and operational autonomy and relies on the MASCOT On Board Computer (MOBC) to sequence its operations and to process the data before transmission to Earth. The 3D hyperspectral data (\(x,y,\lambda\)) are obtained by sequentially acquiring 2D images (\(x,y\)) at different wavelengths (\(\lambda\)). The basic interface level is the request by the MOBC of one image from MicrOmega and the transmission of the acquired data. After reception of the image, the next one is requested. The number of images and the specification of all the parameters associated with each image (e.g. integration time, summing, RF frequency) are set by the MOBC, based on a ground command defining the sequence of observations.
The 3D data cubes (\(x,y,\lambda\)) are compressed onboard via the Langevin and Forni (2000) algorithm before transmission to the ground. This algorithm is based on wavelet transform and has been used successfully for OMEGA/MEx (Bibring et al. 2004) and VIRTIS/Rosetta (Coradini et al. 2007). Since image acquisition can be requested in any order, the 2D (\(x,y\)) images are reorganized from the lowest to the highest wavelength before compression. The resampled 3D data cube is then split into 64 spectral channels 3D data cubes and then compressed in the (\(y,\lambda\)) dimension. The data are stored in a mass memory, uplinked to the Hayabusa2 spacecraft and finally transmitted to Earth.
The structure of MicrOmega Sensor Unit is machined in one block of Aluminum Alloy 6061. It is divided into three main parts: (1) the illumination part with the source and the AOTF-based monochromator, (2) the detection part with the imaging optics and the detector and its cryocooler, and (3) the electronic part.
Here, the global properties of Ryugu are presented along with the best knowledge of the uncertainties in the measurements. The described properties provide essential inputs for mission planning in advance of Ryugu’s arrival. In particular, the design reference mission requires precise knowledge of Ryugu’s orbit and dynamical state, size and shape, and near-surface spectral reflectance properties.
Numerical modeling of NEA orbital evolution indicates that Ryugu originated in the inner asteroid belt. According to a model by Bottke et al. (2002), Ryugu is statistically most likely to have followed the ν6 secular resonance pathway from the main asteroid belt (Campins et al. 2013). This pathway marks the inner boundary of the main asteroid belt at ~ 2.1 AU and is the most efficient way to deliver bodies into near-Earth space, accounting for most of those that reach very Earth-like orbits characterized by low-MOID values and low delta-V space mission trajectories. Several models suggest that Ryugu likely originated in the inner main asteroid belt, between ~ 2.1 and 2.5 AU, and reached ν6 by inward Yarkovsky drift (Campins et al. 2013, Walsh et al. 2013, Bottke et al. 2015).
As discussed in Le Corre et al. (2018), the spherical albedo and phase integral of Ryugu are useful quantities for deriving the bolometric Bond albedo map. These quantities allow us to make temperature prediction across the surface of this asteroid during landing site selection events of the Hayabusa2 mission. These quantities can also be useful to calculate Ryugu’s thermal inertia and constrain the Yarkovsky effect.
where i, e, and α being the incidence angle, the emission angle, and the phase angle, respectively. I is the radiance and has units of W m−2 nm−1 sr−1. To dispel confusion, the value J = πℱ is the collimated light (irradiance) and has units of W m−2 nm−1.
Determining the composition of Ryugu by remote spectroscopic observations requires accounting for viewing geometry and modeling of the asteroid’s surface properties. Reflectance properties of asteroids may differ from laboratory analogs due to grain size, phase angle, and space weathering (Binzel et al. 2015; Sanchez et al. 2012; Reddy et al. 2012). Laboratory spectral measurements of meteorites relevant to Ryugu can improve the interpretation of future hyperspectral observations obtained by Hayabusa2 NIRS3 instrument by linking absorption bands to a well-characterized mineralogical composition. Here, we summarize various authors’ interpretations of their Ryugu spectra, most of which are included in Table 4 (see Le Corre et al. 2018 for a lengthy discussion of spectral interpretations of Ryugu).
Moving from derived quantities, where measured properties are used to derive new values for the properties of Ryugu, here, we use the best evidence regarding Ryugu to predict properties for which there are no measurements of any kind. This section will often rely on the knowledge gained from previous explorations and general estimates for C-type and NEAs. Some are explained in depth, notably block sizes, due to the importance they could have for mission operations planning regarding spacecraft safety.
Safely delivering the spacecraft to the asteroid surface and effectively obtaining a sample are mission critical events that require careful evaluation of the asteroid surface properties. The distribution and abundance of boulders and craters pose the greatest risk to spacecraft flight that must be carried out autonomously. The surface roughness or regolith grain size distribution is irrelevant to safety but critical to the ability to successfully obtain a sample. Here, we summarize spacecraft observations of asteroids that provide useful guidance for what we can expect upon arrival to asteroid Ryugu.
Here, surface roughness at the meter-scale is described, to be distinguished from the smaller-scale roughness that is a parameter in thermophysical model fitting routines, or roughness in terms of very fine scale regolith grains—both are discussed in later sections. The surface roughness of Itokawa and Eros has been measured by rendezvous spacecraft laser altimeters. Itokawa’s two major regions, the highlands and lowlands, have different surface roughnesses that are obvious even in the images. The roughest parts of the asteroid correspond to those with more boulders, which correspond to regions of higher geopotential (Barnouin-Jha et al. 2008). It is thought that finer materials may move to regions of lower geopotential and cover up larger boulders, creating a smoother (less rough) region. These areas are thought to correspond to areas with the thickest (fine) regolith. Over baselines of 8–50 m, the highlands of Itokawa are 2.3 ± 0.4 m rougher than the MUSES-C region (Barnouin-Jha et al. 2008); this difference may correspond to the expected regolith depth in this area. Alternatively, it is possible that large boulders are segregated to higher geopotential through the granular physics phenomena known as the Brazil nut effect, whereby under the action of various shaking processes, segregation occurs with larger bodies moving upward in the geopotential (Tancredi et al. 2015).
We assumed above that the surface of Ryugu is smooth. If the roughness of the surface is taken into account, the apparent temperature distribution changes depending on the degree of roughness (Rozitis and Green 2011; Davidsson and Rickman 2014, Davidsson et al. 2015). The temperature of a slope is especially affected at dawn and dusk. A wall of a valley observed at a low phase angle will have a much higher temperature than the horizontal, surrounding surface. Contrarily, when observing a wall against the sun, it will be much colder than its surroundings. In addition to the case of concave areas such as craters, the absorption of radiation could raise the temperature of the bottom area of the concavity depending on its size and shape. Moreover, we must point out that the bond albedo of a rough surface changes with solar incident angle (Senshu et al. in preparation). These effects need to be taken into account when analyzing the apparent temperature distribution obtained by the Hayabusa2 TIR instrument.
For the grain shape as shown in Figs. 11 and 12, we note that the mean aspect ratios of particles returned from the asteroid Itokawa by the Hayabusa mission, b/a and c/a (a is the longest axis, b is the medium axis, c is the shortest axis) (Tsuchiyama et al. 2014), are 0.72 ± 0.13 and 0.44 ± 0.15, respectively, and are similar to the mean axial ratio of fragments generated in laboratory impact experiments (a:b:c ≈ 2:√2:1 or b/a ≈ 0.71 and c/a ≈ 0.5). Note that the bulk density of Itokawa samples is 3.4 g cm−3. The average porosity of Itokawa samples is 1.5%. We do not have any data yet for a C-type asteroid like Ryugu.
However, another mechanism, called the Brazil nut effect, may cause an opposite trend (Tancredi et al. 2012, 2015; Matsumura et al. 2014; Maurel et al. 2017) and segregate larger particles to the surface, as seen on Itokawa. Thus, coarse gravel (1 cm or greater) may be expected to exist on the surface overlaying fine-grained material with the fraction of fines increasing with depth. The combination of low surface acceleration and solar radiation pressure tends to strip off fine particles that have been generated by comminution processes and leave lags of larger, harder to move materials. On the other hand, this material may experience thermal fatigue that can turn them in smaller pieces. There is thus a competition between various processes, and we are not yet in a position to understand which one is dominant or their respective contributions to the final product. We would actually need at least one image of the surface of a C-type asteroid of Ryugu’s size, which does not yet exist, and thus, we have to wait for Hayabusa2 to provide one.
For sample return missions, very flat areas among the wide variety of asteroid surfaces are the most sought after since they are the safest places to touch down. As revealed by asteroid surfaces imaged at the centimeter scale, ponds are good candidates (Veverka et al. 2001; Robinson et al. 2001; Cheng et al. 2002; Miyamoto et al. 2007). Since it is likely ponds are present on Ryugu’s surface, it is essential to know if there is a difference between the material present in the ponds and the material in other areas. Do our chondrite samples help us solve this issue?
MicrOmega is divided into two main parts: (1) the MicrOmega Sensor Unit (MSU) with the illumination, detection and proximity electronics parts and (2) the MicrOmega Electronic Unit (MEU) inside the MASCOT E-box (see Sect. 2.2.3) (Fig. 1).
The sensor is the space qualified Sofradir Neptune SMW made of a HgCdTe detection array, hybridized on a CMOS CTIA readout circuit. The array has a size \(500\times256~\mbox{px}^{2}\) and a 30 μm pixel pitch; for this mission, only the central area of \(125\times 128~\mbox{px}^{2}\) is used. The HgCdTe spectral sensitivity has been tuned to cover the 0.9 to 3.7 μm spectral range. It operates at 110 K nominally with a resulting dark current of 10 fA/px. The well depth is estimated at \(2.2 10^{6}~\mbox{e}^{-}\mbox{/px}\). The detector is encapsulated in a hermetic Dewar, within which it is mounted on the cold part of a dedicated Ricor K508S cryocooler (with a temperature closed loop control system). Within the Dewar, a baffle, coupled to be cooled by the cryocooler, is placed in front of the detector, to strictly limit the thermal fluxes entering the detector to those coming from the samples.
Electronic functions are implemented on two boards with separated functions; one board is implemented inside the MASCOT common E-box (MicrOmega Electronic Unit /MEU) while the second (MicrOmega Proximity Electronic) is implemented inside the MSU. The MicrOmega Electronic Unit provides simple power interface between MASCOT PCDU and the instrument, the SpaceWire/data interface (nominal and redundant link) and the control of all electrical subsystems of MSU. It also manages some simple data processing and a stand-alone test mode. The MicrOmega Proximity Electronic is mounted inside the MSU, close to the analog parts of the instrument (detector, temperature sensors), to minimize the potential perturbations. There are 3 interconnect harnesses (MIH), under DLR responsibility, between MASCOT E-box and MSU. Most of lines inside these harnesses are digital lines or power lines.
The Radio Frequency Synthesizer (RFS) is also implemented within the MSU. It generates a radio frequency signal in the 27–104 MHz range, which controls the AOTF transducers, as described above. The 20 kHz frequency step enables to scan the light wavelength within the 0.99–3.65 μm (\(10101\mbox{--}2740~\mbox{cm}^{-1}\)) range with \(2~\mbox{cm}^{-1}\) steps. The typical RF output power is \(2.0~\mbox{W} \pm 0.5~\mbox{W}\) for a power consumption \(< 5~\mbox{W}\). The use of two transducers for the AOTF enables to keep a good impedance match over the whole RF frequency range; the VSWR (voltage standing wave ratio), which characterizes the power transmission to the AOTF, remains below 1.15.
To insure optimization at system level, the MicrOmega instrument has a very limited data handling and operational autonomy and relies on the MASCOT On Board Computer (MOBC) to sequence its operations and to process the data before transmission to Earth. The 3D hyperspectral data (\(x,y,\lambda\)) are obtained by sequentially acquiring 2D images (\(x,y\)) at different wavelengths (\(\lambda\)). The basic interface level is the request by the MOBC of one image from MicrOmega and the transmission of the acquired data. After reception of the image, the next one is requested. The number of images and the specification of all the parameters associated with each image (e.g. integration time, summing, RF frequency) are set by the MOBC, based on a ground command defining the sequence of observations.
The 3D data cubes (\(x,y,\lambda\)) are compressed onboard via the Langevin and Forni (2000) algorithm before transmission to the ground. This algorithm is based on wavelet transform and has been used successfully for OMEGA/MEx (Bibring et al. 2004) and VIRTIS/Rosetta (Coradini et al. 2007). Since image acquisition can be requested in any order, the 2D (\(x,y\)) images are reorganized from the lowest to the highest wavelength before compression. The resampled 3D data cube is then split into 64 spectral channels 3D data cubes and then compressed in the (\(y,\lambda\)) dimension. The data are stored in a mass memory, uplinked to the Hayabusa2 spacecraft and finally transmitted to Earth.
The structure of MicrOmega Sensor Unit is machined in one block of Aluminum Alloy 6061. It is divided into three main parts: (1) the illumination part with the source and the AOTF-based monochromator, (2) the detection part with the imaging optics and the detector and its cryocooler, and (3) the electronic part.

The Japan Aerospace Exploration Agency’s Hayabusa2 mission dropped off its sample collection capsule before moving on to the next part of its extended mission: visiting more asteroids.
Hayabusa2 launched on December 3, 2014, and arrived at the near-Earth asteroid Ryugu in June 2018. The spacecraft collected one sample from the asteroid’s surface on February 22, 2019, then fired a copper “bullet” into the asteroid to create a 33-foot wide impact crater. A sample was collected from this crater on July 11, 2019.
The agency’s first Hayabusa mission returned samples from the asteroid Itokawa to Earth in June 2010, but scientists said that due to failure of the spacecraft’s sampling device, they were only able to retrieve micrograms of dust from the asteroid.
Since Hayabusa2 isn’t returning to Earth, it ejected the 35-pound sample return capsule as it swung by our planet at a distance of 136,701 miles. Then, the spacecraft changed its course to travel beyond Earth and move along with its extended mission.
“Just spotted #hayabusa2 from #ISS! Unfortunately not bright enough for handheld camera, but enjoyed watching capsule! Thanks Houston & Tsukuba for pointing information!!!”
Just spotted #hayabusa2 from #ISS! Unfortunately not bright enough for handheld camera, but enjoyed watching capsule! Thanks Houston & Tsukuba for pointing information!!!— NOGUCHI, Soichi 野口 聡一(のぐち そういち) (@Astro_Soichi) December 5, 2020
The Australian government granted JAXA permission to land its capsule in the Woomera Prohibited Area in South Australia. This remote area is used by Australia’s Department of Defence for testing.
Hayabusa2 will fly by three asteroids between 2026 and 2031, eventually reaching the rapidly rotating micro-asteroid 1998 KY26 in July 2031 millions of miles from Earth. It will be the first flyby of this type of asteroid.
“I anticipate that the Hayabusa2 samples of asteroid Ryugu will be very similar to the meteorite that fell in Australia near Murchison, Victoria, more than 50 years ago,” said Trevor Ireland, professor in the Australian National University Research School of Earth Sciences and a member of the Hayabusa2 science team in Woomera, in a statement.
The NASA OSIRIS-REx mission recently collected a sample from another near-Earth asteroid, Bennu, that is similar in composition to Ryugu. In fact, based on early data from both missions, scientists working on both missions believe it’s possible these two asteroids once belonged to the same larger parent body before it was broken apart by an impact.

After delivering the capsule containing a sample from asteroid Ryugu to Earth on December 6, 2020, the Hayabusa2 spacecraft began a new adventure. This additional journey is called the "Hayabusa2 Extended Mission." As this new mission begins, the original "Hayabusa2 Project" has drawn to a close. With the work for the first mission now complete, the Hayabusa2 Project was dissolved at the end of June 2022, and will be taken over by the Extended Mission. On this occasion, we would like to announce the nickname and logo design for the Hayabusa2 Extended Mission.
The nickname of the Extended Mission is "Hayabusa2♯", read "Hayabusa2 Sharp". The character "♯" is a musical symbol that means "raise the note by a semitone," and for this mission, it is also the acronym for "Small Hazardous Asteroid Reconnaissance Probe." This name indicates that the Hayabusa2 Extended Mission is set to investigate small but potentially dangerous asteroids that may collide with the Earth in the future. The English meaning of the word "sharp" also highlights the extremely challenging nature of this mission, which is also reflected in the musical meaning of "raise the note by a semitone," suggestive of raising of the rank of the mission.
As the character "♯" is a musical symbol, it can be difficult to enter in practice when typing. The symbol can therefore be substituted for the "#" symbol (number sign/pound/hash) that is on computer keyboards or phones. There is no problem with the notation "Hayabusa2♯" (musical symbol) or "Hayabusa2#".
The logo depicts the spacecraft departing Earth and heading on a journey to explore two asteroids, 2001 CC21 and 1998 KY26. In addition to spacecraft operations, the Hayabusa2 Extended Mission will conduct three activities: "joint scientific analysis of samples from Hayabusa2 and NASA"s OSIRIS-REx", "ready curation facilities to accept the OSIRIS-REx sample", and "widely disseminate Hayabusa2 science results to the international community". The four trajectories on the logo show how these activities interact as they proceed. The background shows the sharp character in the form of a star, with the four sharp star shapes also indicating the spacecraft operations with the three activities.



 8613371530291
8613371530291