
mars opportunity mission parts free sample
Two astronauts collected Moon rocks on Apollo 11. It will take three robotic systems working together to gather up the first Mars rock samples for return to Earth.
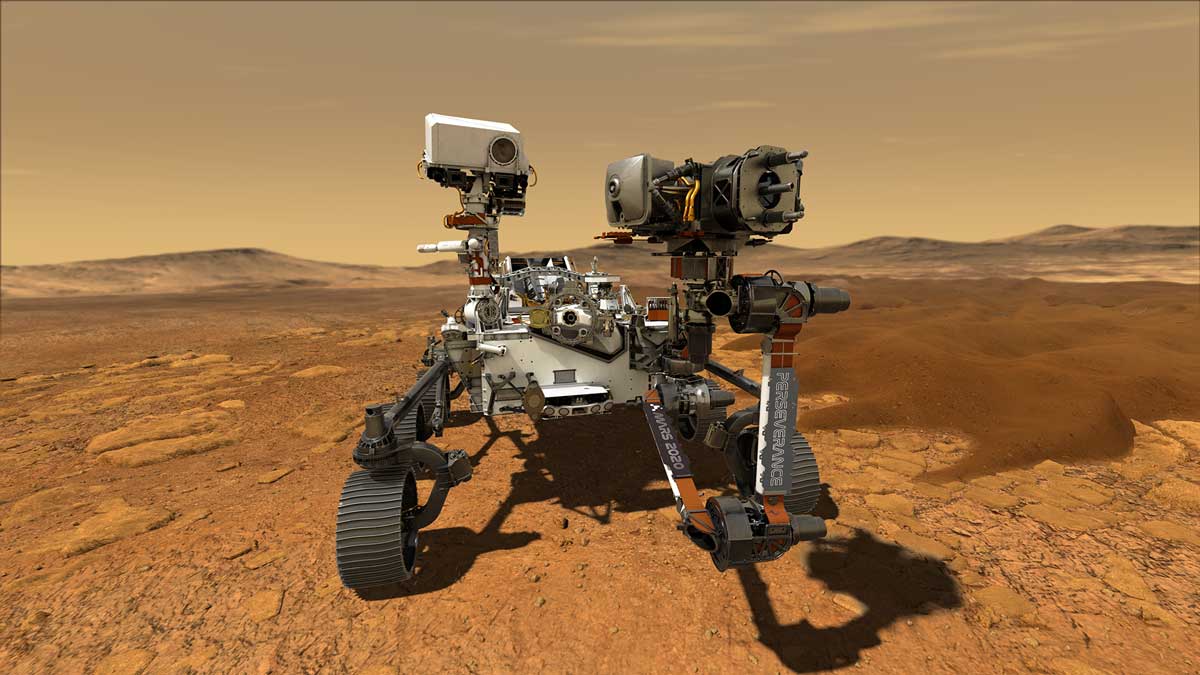
The samples Apollo 11 brought back to Earth from the Moon were humanity"s first from another celestial body. NASA"s upcoming Mars 2020 Perseverance rover mission will collect the first samples from another planet (the red one) for return to Earth by subsequent missions. In place of astronauts, the Perseverance rover will rely on the most complex, capable and cleanest mechanism ever to be sent into space, the Sample Caching System.
"While you cannot help but marvel at what was achieved back in the days of Apollo, they did have one thing going for them we don"t: boots on the ground," said Adam Steltzner, chief engineer for the Mars 2020 Perseverance rover mission at NASA"s Jet Propulsion Laboratory in Southern California. "For us to collect the first samples of Mars for return to Earth, in place of two astronauts we have three robots that have to work with the precision of a Swiss watch."
Mars 2020 Perseverance Rover Sample Cache System: Engineers test the Sample Caching System on the Perseverance Mars rover. Described as one of the most complex robotic systems ever built, the Sample and Caching System will collect core samples from the rocky surface of Mars, seal them in tubes and leave them for a future mission to retrieve and bring back to Earth. Credits: NASA/JPL-Caltech. Download video ›
While many people think of the Perseverance rover as one robot, it"s actually akin to a collection of robots working together. Located on the front of the Perseverance rover, the Sample Caching System itself is composed of three robots, the most visible being the rover"s 7-foot-long (2-meter-long) robotic arm. Bolted to the front of the rover"s chassis, the five-jointed arm carries a large turret that includes a rotary percussive drill to collect core samples of Mars rock and regolith (broken rock and dust).
The second robot looks like a small flying saucer built into the front of the rover. Called the bit carousel, this appliance is the ultimate middleman for all Mars sample transactions: It will provide drill bits and empty sample tubes to the drill and will later move the sample-filled tubes into the rover chassis for assessment and processing.
All of these robots need to run with clocklike precision. But where the typical Swiss chronometer has fewer than 400 parts, the Sample Caching System has more than 3,000.
"It sounds like a lot, but you begin to realize the need for complexity when you consider the Sample Caching System is tasked with autonomously drilling into Mars rock, pulling out intact core samples and then sealing them hermetically in hyper-sterile vessels that are essentially free of any Earth-originating organic material that could get in the way of future analysis," said Steltzner. "In terms of technology, it is the most complicated, most sophisticated mechanism that we have ever built, tested and readied for spaceflight."
The mission"s goal is to collect a dozen or more samples. So how does this three-robot, steamer-trunk-sized labyrinthine collection of motors, planetary gearboxes, encoders and other devices all meticulously work together to take them?
"Essentially, after our rotary percussive drill takes a core sample, it will turn around and dock with one of the four docking cones of the bit carousel," said Steltzner. "Then the bit carousel rotates that Mars-filled drill bit and a sample tube down inside the rover to a location where our sample handling arm can grab it. That arm pulls the filled sample tube out of the drill bit and takes it to be imaged by a camera inside the Sample Caching System."
Getting the system designed and manufactured, then integrated into Perseverance has been a seven-year endeavor. And the work isn"t done. As with everything else on the rover, there are two versions of the Sample Caching System: an engineering test model that will stay here on Earth and the flight model that will travel to Mars.
"The engineering model is identical in every way possible to the flight model, and it"s our job to try to break it," said Kelly Palm, the Sample Caching System integration engineer and Mars 2020 test lead at JPL. "We do that because we would rather see things wear out or break on Earth than on Mars. So we put the engineering test model through its paces to inform our use of its flight twin on Mars."
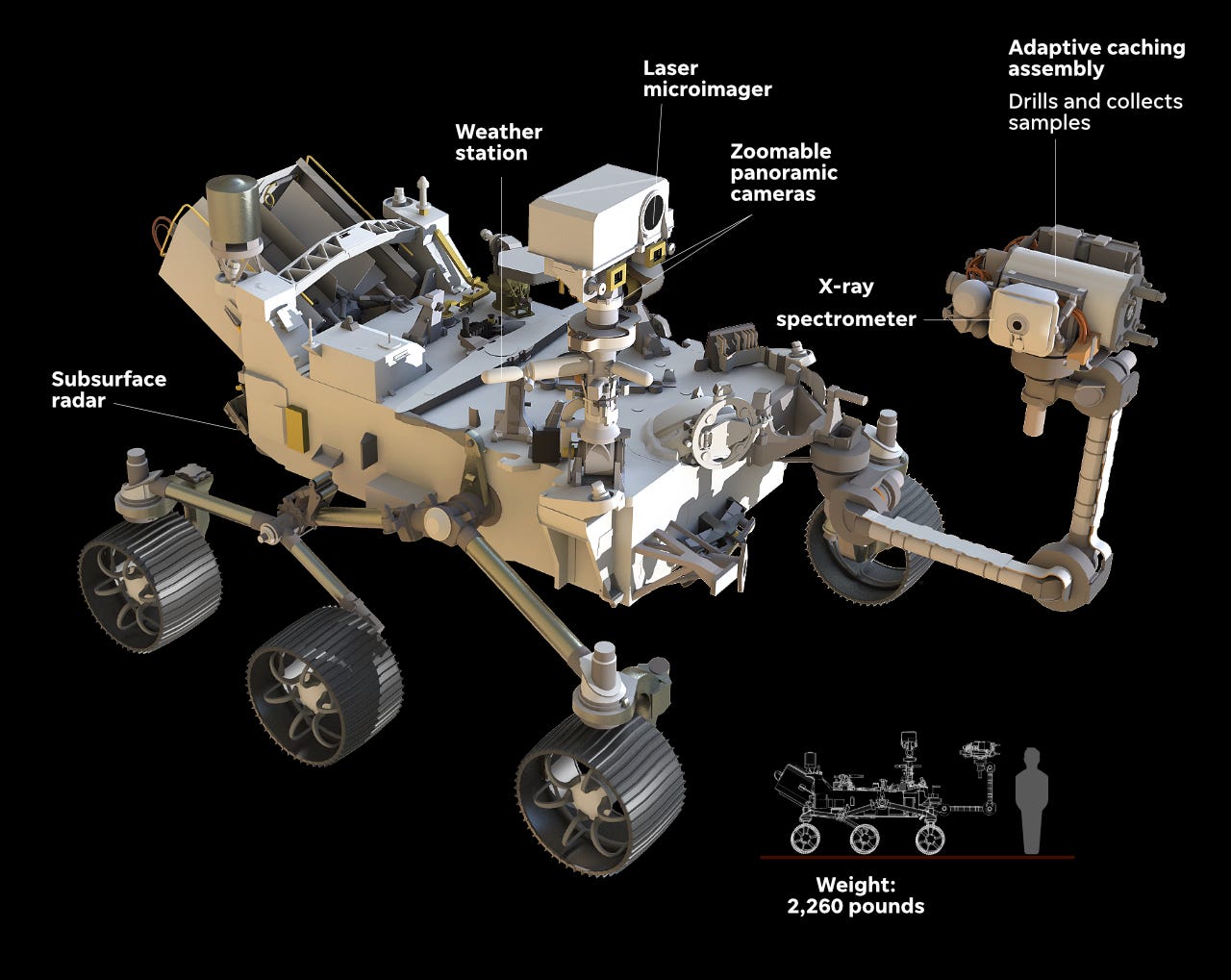
Perseverance is a robotic scientist weighing about 2,260 pounds (1,025 kilograms). The rover"s astrobiology mission will search for signs of past microbial life. It will characterize the planet"s climate and geology, collect samples for future return to Earth, and pave the way for human exploration of the Red Planet. No matter what day Perseverance lifts off during its July 17-Aug. 11 launch period, it will land at Mars" Jezero Crater on Feb. 18, 2021.
The two subsequent (follow-on) missions required to return the mission"s collected samples to Earth are currently being planned by NASA and the European Space Agency.
The Mars 2020 Perseverance rover mission is part of a larger program that includes missions to the Moon as a way to prepare for human exploration of the Red Planet. Charged with returning astronauts to the Moon by 2024, NASA will establish a sustained human presence on and around the Moon by 2028 through the agency"s Artemis lunar exploration plans.

NASA"s Opportunity rover was one of the most successful and enduring interplanetary missions. Opportunitylanded on Mars in early 2004 soon after its twin rover Spirit. Opportunity operated almost 15 years, setting several records and making a number of key discoveries.
Opportunity exceeded its life expectancy by 60 times and had traveled more than 28 miles (45 kilometers) by the time it reached its appropriate final resting spot on Mars – Perseverance Valley.
Opportunity launched at 03:18:15 UTJuly 8, 2003, from Cape Canaveral, Florida, and traveled for six months, landing on Mars onJan. 25, 2004, just 20 days after its twin rover, Spirit, landed on the other side of the Red Planet.
The twin missions’ main scientific objective was to search for a range of rocks and soil types and then look for clues for past water activity on Mars. Each rover, about the size of a golf cart and seven times heavier (408 pounds or185 kilograms) than the Sojourner rover on Mars, was targeted to opposite sides of the planet in locales that were suspected of having been affected by liquid water in the past.
This area now became known as the Challenger Memorial Station, in tribute to the Space Shuttle crew lost in 1986. Opportunity landed in a relatively flat plain but within an impact crater known as Eagle.
After extensive studies within Eagle, on March 22, 2004, Opportunity climbed up the edge of the crater and rolled out and headed for a new phase of its mission in Endurance Crater, about 820 yards (750 meters) away.
After exiting Eagle, the rover took some spectacular shots of the abandoned area where the lander, backshell, and parachute were still visible. Near its discarded heat shield, Opportunity discovered an unusual basketball-sized rock in January 2005 (named the “Heat Shield Rock”) that turned out to be an iron-nickel meteorite.
This self-portrait of NASA"s Mars Exploration Rover Opportunity comes courtesy of the Sun and the rover"s front hazard-avoidance camera. The dramatic snapshot of Opportunity"s shadow was taken as the rover moved into Endurance crater. The image was taken on sol 180 (July 26, 2004), a date that marked double the rover"s primary 90-sol mission. Credit: NASA/JPL-Caltech
Later that year, the rover got stuck after driving into an area where several of its wheels were buried in sand. Controllers at NASA"s Jet Propulsion Laboratory in Pasadena, California, (JPL), were able to maneuver the vehicle a few inches at a time and to free Opportunity in June 2005 after six weeks.
In March 2006, Opportunity began the last mile (2 kilometers) of its journey to Victoria, a crater that stretches ahalf-mile (800 meters) in diameter—wider and deeper than any yet examined by either rover. After a 21-month trip, Opportunity finally arrived at Victoria in September 2006 and sent back striking pictures of its rim.
The following year, 2007, was an important test for Opportunity when severe dust storms plagued Mars. By July 18, the rover’s solar panels were reporting power at only 128 watt hours, the lowest for either rover at that point. All science activities were indefinitely suspended for Opportunity which faced much more severe conditions than Spirit.
After about six weeks the dust storms abated and Opportunity was back in action. On Sept. 11, 2007, the rover entered Victoria Crater, staying inside for almost a year and sending back a wealth of information on its soil.
Opportunity captured this vista of Victoria crater from Cape Verde, one of the promontories that are part of the scalloped rim of the crater. Opportunity drove onto Cape Verde shortly after arriving at the rim of Victoria in September 2006. Credit: NASA/JPL-Caltech/Cornell
On the way there, the rover found the so-called Marquette Island rock, “different in composition and character from any known rock on Mars or meteorite from Mars,” according to Steve Squyres, the principal investigator for the rovers. The rock appeared to have originated deep in the Martian crust and someplace far away from the landing site, unlike almost all the rocks previously studied by Opportunity.
By March 24, 2010, Opportunity had about 12 miles (20 kilometers) on its odometer, more than double the distance recorded by Spirit, and far more than was originally considered a nominal mission—1,968 feet (600 meters).
Two months later, on May 20—with Spirit already inactive—Opportunity broke the record set by the Viking 1 Lander for the longest continuous operation on the surface of Mars: 6 years and 116 days.
In September 2011, NASA announced that an aluminum cuff that served as a cable shield on each of the RATs on the rovers was made from aluminum recovered from the World Trade Center towers, destroyed during the terrorist attacks on Sept. 11, 2001. Honeybee Robotics, which helped build the tool, had its offices in New York that day not far from the attacks. As a memorial to the victims, JPL and Honeybee worked together to include the aluminum on the Mars rovers.
Through late 2012 and into 2013, Opportunity worked around a geographic feature named Matijevic Hill, which overlooks the Endeavour crater, analyzing rocks and soil.
By August 2013, Opportunity was at Solander Point, an area of contact between a rock layer that was formed in acidic wet conditions long before and an older one from a more “neutral” environment.
On Jan. 4, 2014, Opportunity passed 10 years on the surface of Mars, now with relatively clean surfaces on its solar panels that allowed for increased power to the rover. A “selfie” from March 2014 showed a rover swept clean by wind earlier in the month. This raised hopes for continuing the mission.
This self-portrait of Opportunity shows how the wind had cleaned much of the dust off the rover"s solar panels. It combines multiple frames taken by Opportunity"s panoramic camera (Pancam) through three different color filters from March 22 to March 24, 2014. Credit: NASA/JPL-Caltech/Cornell Univ./Arizona State Univ.
As it continued to explore the Martian surface, on July 28, 2014, NASA announced that Opportunity had passed the distance record set on another celestial body, set by Lunokhod 2, when the American rover’s odometer showed 25.01 miles (40.25 kilometers), exceeding the Soviet vehicle’s record of 24 miles (39 kilometers). However, Russian analysis of images from NASA"s Lunar Reconnaissance Orbiter (LRO) suggests that Lunokhod 2 may actually have traveled as much as 26 miles (42 kilometers).
The rover was generally in good health, but because of the large number of computer resets in the preceding month, which interfered with its science goals, mission planners implemented a complete reformat of its flash memory on Sept. 4, 2014. The same day, NASA announced a ninth extension of Opportunity"s mission—adding another two years with a mission to nearby Marathon Valley.
At the beginning of September, Opportunity had covered about 25 miles (40.69 kilometers). At launch, like its sister rover, Spirit, Opportunity was designed to have a lifetime of 90 sols (Martian days)—about three Earth months.
On March 25, 2015, NASA announced that having traveled 26.219 miles (42.195 kilometers), Opportunity had become “the first human enterprise to exceed marathon distance of travel on another world.”
In its seventh Martian winter (Earth winter 2015–2016), Opportunity was kept at “energy-minimum” levels due to the relative lack of solar energy. Still, Opportunity kept busy, using its rock abration tool (RAT) to remove surface dust from a target called “Private John Potts,” the name a reference to a member of the Lewis and Clark Expedition.
During this period, Opportunity continued to explore the western rim of the 13-mile (22-kilometer) wide Endeavour crater, particularly the south side of Marathon Valley, which slices through Endeavour crater’s rim from west to east.
From its perch high on a ridge, NASA"s Opportunity rover recorded this image of a Martian dust devil twisting through the valley below. The view looks back at the rover"s tracks leading up the southern edge of Marathon Valley in Endeavour crater. Opportunity took the image on March 31, 2016, during the 4,332nd Martian day, or sol, of the rover"s work on Mars. Credit: NASA/JPL-Caltech
On March 10, 2016, while making its closest approach to a target near the crest of Knudsen crater, it drove at a tilt of 32 degrees, breaking the record for the steepest slope driven by any rover on Mars—a record previously set by Opportunity during a climb in January 2004.
In October 2016, Opportunity began its two-year extended mission that included investigations in the Bitterroot Valley portion of the western rim of the Endeavour crater. The plan was for the rover to travel into a gully that slices Endeavor and is about two football fields in length. Opportunity Principal Investigator Steve Squyres noted that scientists were “confident [that] this is a fluid-carved gully, and that water was involved.”
On Feb. 7, 2017, Opportunity passed the 27-mile (44-kilometer) mark on its odometer, as it made slow progress towards its next major scientific objective, a gully named Perseverance Valley. It reached the valley by the first week of May.
For about three weeks during June and July, there was reduced communication with the rover due to a solar conjunction (when the Sun comes between Earth and Mars). In mid-July, Opportunity finally entered Perseverance Valley and began driving down into the gully during which time, rover energy levels dropped due to reduced Sun exposure.
Opportunity went quiet during a historic Mars-wide dust storm in 2018 that reduced the energy available to the rover"s solar panels. The last signal from the spacecraft was heard on June 10, 2018.
Designed to last just 90 Martian days and to travel 1,100 yards (1,000 meters), Opportunity vastly surpassed all expectations in its endurance, scientific value and longevity. In addition to exceeding its life expectancy by 60 times, the rover had traveled over 28 miles (45 kilometers) by the time it reached its most appropriate final resting spot on Mars -- Perseverance Valley.
This panoramic image, dubbed Rub al Khali, was acquired by NASA"s Opportunity rover on the plains of Meridiani from May 6 to May 14, 2005. Opportunity was about 1.2 miles (2 kilometers) south of Endurance crater at a place known informally as Purgatory Dune. Credit: NASA/JPL/Cornell
The Perseverance rover drilled free two of what scientists call regolith samples as it continues its mission to investigate geological processes and to search for tell-tale evidence that life once existed on Mars. The NASA-operated rover grabbed the regolith samples on Dec. 2 and Tuesday (Dec. 6), adding them to its collection of 15 rock cores liberated from the planet"s Jezero Crater (plus one atmospheric sample) since the spacecraft landed in February 2021.
Although the majority of the samples Perseverance collects throughout its mission will be rock cores that could contain the telltale signs of life, scientists have determined that regolith samples like these could be key to understanding the geological processes that have shaped Mars.
Additionally, regolith samples could help scientists plan for future space missions and mitigate the challenges astronauts could eventually face on the Martian surface.
This is because regolith can affect a wide variety of equipment, from energy-gathering solar panels to the spacesuits worn by astronauts. Not only could fine rock powder and dust jam sensitive parts and even slow down rovers on the surface, but larger pieces of sharp rock within regolith could put astronauts at risk by tearing holes in spacesuits.
"If we have a more permanent presence on Mars, we need to know how the dust and regolith will interact with our spacecraft and habitats," Erin Gibbons, a doctoral student at McGill University in Canada and a Perseverance team member, said in a statement. "Some of those dust grains could be as fine as cigarette smoke, and could get into an astronaut"s breathing apparatus. We want a fuller picture of which materials would be harmful to our explorers, whether they"re human or robotic."
Hence the interest in Martian regolith and the effort to include the material in the collection Perseverance is building for the proposed Martian sample return mission being developed by NASA and the European Space Agency to bring the rover"s collection to Earth. Here, scientists could study the regolith in greater detail in labs with more sensitive and powerful equipment than the chemical analysis instruments robots can carry to the Red Planet.
This drill bit was engineered and tested using simulated Martian regolith developed by scientists at NASA"s Jet Propulsion Laboratory (JPL) in California. This faux-Mars material consists of volcanic rock crushed into different particle sizes, ranging from large coarse pebbles to fine dust, and was inspired by images of actual Martian regolith and data collected by previous Mars missions.
SANTA FE, N.M. — With NASA"s sample-caching 2020 Mars rover mission just around the corner, the best strategy for hauling Red Planet rock and dirt to Earth is a now a topic of considerable discussion and debate.
To grapple with the scientific, technological, and policy issues that come with such a robotic venture, NASA has created a Returned Sample Science Board (RSSB). A half-day workshop on where this effort now stands took place here July 23, before the 80th annual meeting of The Meteoritical Society, which was held July 24 through July 28. [Pieces of Heaven: A Brief History of Sample-Return Missions]
An objective of the workshop was to familiarize the international sample-analysis community with the Mars 2020 rover mission. That six-wheeled robot is being equipped to collect samples and cache them on Mars for future pickup and delivery back to Earth.
NASA"s Mars 2020 rover is scheduled to lift off in July or August 2020 and set down on the Red Planet in February 2021. At the moment, there are three landing site candidates, all of which are deemed good candidates to harbor evidence of past Mars life, if it ever existed. A decision on the final touchdown spot is expected next year.
"Mars 2020 will gather samples for potential return to Earth in the future. It’s time for the sample-analysis community to get serious about defining and prioritizing Mars sample science, and in helping to make the case for the future missions that would get those samples home," said RSSB co-leader David Beaty, chief scientist for the Mars Exploration Directorate at NASA"s Jet Propulsion Laboratory (JPL) in Pasadena, California.
Hurling back to Earth pieces of Mars has been deliberated for decades, Beaty said, with the space science community patiently waiting for the time when such a robotic mission was feasible. "Well, it"s getting real and the opportunity is there," he told Space.com. "But if we"re not careful, it"s possible to squander the opportunity."
Caching a set of returnable samples is a top requirement for the 2020 rover, said Ken Farley, project scientist for the mission at the California Institute of Technology in Pasadena.
The intent is to use the Mars machinery, Farley said, to find and characterize ancient habitable Martian environments, identify rocks with the highest chance of preserving signs of ancient Martian life if it were present, and, within those environments, seek the signs of life.
Specifically, the robot is capable of acquiring 37 "scientifically enticing" samples in total. But the prime mission duty is to snare 20 samples over 1.5 Mars years, Farley said. The samples will be encased in tightly sealed tubes and cached for later recovery by a follow-on lander, which is not officially on NASA"s books yet. [NASA"s Mars Rover 2020 Mission in Pictures (Gallery)]
Joe Parrish, deputy manager of the Mars Program Formulation Office at JPL, detailed several possible sample-return strategies. "We"re looking at a variety of mission architectures to do that," he said.
One involves a small "fetch rover" that gathers up and moves the samples to a stationary Mars Ascent Vehicle, or MAV. Other ideas involve a larger solar- or nuclear-powered rover that"s mobile and hauls around a MAV on its back for ship-and-shoot purposes.
Once propelled off the Red Planet by the MAV, the encapsulated specimens would enter Mars orbit for rendezvous and pickup by a solar electric propulsion orbiter. From there, the grab-and-go courier service plan might involve shipping the samples directly back to Earth for a high-speed desert landing, Parrish said.
The Mars samples could also be taken to the Earth-moon system for linkup with NASA"s proposed Deep Space Gateway/Orion spacecraft facility, Parrish said. From there, a human crew could bring the Mars goods home to Earth.
Scientists are already thinking about how to handle Mars samples here on Earth, said Francis McCubbin, astromaterials curator within NASA"s Johnson Space Center"s Astromaterials Research and Exploration Science Division in Houston.
"Curation doesn’t begin when the samples come back. It doesn"t begin when they arrive on Earth. And it doesn"t begin when you"re building a spacecraft," McCubbin said. "Curation begins at the inception of the mission."
McCubbin said that Mars sample-return is going to present some distinctive challenges. For instance, Mars — along with Jupiter"s moon Europa and the Saturn satellite Enceladus — is designated as a Planetary Protection Class V restricted Earth-return body. This term, he said, is reserved for cosmic objects deemed to be of significant interest to the process of chemical evolution and/or the origin of life.
In regard to Mars rock and soil, there is a need to conduct, under strict containment and using approved techniques, timely analyses of the unsterilized sample collected and brought to Earth.
Before any Mars specimens are released to the general scientific community for study, McCubbin said a "Sample Pre-Release Report" must be prepared to certify that the sample will not harm Earth’s biosphere. This report verifies that biohazard and life-detection protocols have been carried out and that samples are safe for release, he said.
There is a body of research and techniques now used, in addition to know-how using high-level biosafety facilities, that can help guide the proper handling of Mars samples, McCubbin said.

The JPL Open Source Rover is an open source, build it yourself, scaled down version of the 6 wheel rover design that JPL uses to explore the surface of Mars. The Open Source Rover is designed almost entirely out of consumer off the shelf (COTS) parts. This project is intended to be a teaching and learning experience for those who want to get involved in mechanical engineering, software, electronics, or robotics.
The specific attributes of the robot you build will depend slightly on the type of electronics and motors you buy for the system. The numbers shown below are for the version of the robot that contains exactly the parts that we suggest in our build documents and parts list. Below, you can see which parts could be changed for which spec upgrades.
Again, the above statistics depend on which components you select when buying parts. One potential change is for the motors; you can, for example, select higher RPM motors (to drive your rover faster) at the sacrifice of max stall torque, which would potentially limit your rover"s ability to climb. A selection of motors that would integrate easily with the rest of the suggested rover design can be found at GoBilda.
This rover is designed to function similarly to the 6 wheel rover designs on Mars and employs a few of the major driving mechanics that the mars rovers use to traverse rocky surfaces:
Thank you to Lauren Schooley for creating a mission patch for the project. The patch is free for use as a team patch, for stickers, or decorating your rover. The design is released under the Creative Commons Attribution-NoDerivatives public license. A variety of file formats is available.
Fabrication/Machining: Although most the parts are COTS there are a few modifications necessary to adapt them to the project. These modifications will be in the form of
This project assumes you have some standard tools to help assemble the project. If you do not have any of the optional tools, we provide examples of online services that you can use to have the parts fabricated and sent to you.
The Master Parts List contains all the parts necessary to build the entirety of the robot as it is listed in our documentation. We recognize that you may want to change, add, and redesign some sections, so each of the individual build sections also contain a parts list for that corresponding section of the project. Note that these individual parts list recommend buying quantities necessary only for that section. Be sure to assess the quantities you need for common items (particularly screws, nuts, bolts, and other common hardware) if you are changing subassemblies.
In order to help this ordering process we have compiled a few links of a large number of these together already, if you wish to build exactly what is in our build documentation. Note that some of these parts might not be available or outdated. Please check the master parts list for the most up-to-date list of items.
In addition to ordering all of the parts on the parts list, we recommend that some pieces be 3D printed and laser cut. If you do not have access to a 3D printer or laser cutter, we"ve added some online services as examples for where you can get those manufactured and shipped to you. You"ll find instructions on this in the Body Build Doc, Corner Steering Build Doc, and Head Assembly Build Doc.
Above is an example roadmap of how you can build the rover and which parts of the build are dependent on the other sections. It is broken down into 5 stages:
Stage 2: Once you have all the parts, everything in stage 2 can be completed in parallel. It is highly recommended to start on the electrical testing of components outside the robot before doing any electrical work inside the completed robot body. You can also work on the software at any stage between here and the end.
Spirit, also known as MER-A (Mars Exploration Rover – A) or MER-2, is a Mars robotic rover, active from 2004 to 2010.Spirit was operational on Mars for 2208 sols or 3.3 Martian years (2249 days; 6 years, 77 days). It was one of two rovers of NASA"s Mars Exploration Rover Mission managed by the Jet Propulsion Laboratory (JPL). Spirit landed successfully within the impact crater Gusev on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, NASA-sponsored student essay competition. The rover got stuck in a "sand trap" in late 2009 at an angle that hampered recharging of its batteries; its last communication with Earth was on March 22, 2010.
The rover completed its planned 90-sol mission (slightly less than 92.5 Earth days). Aided by cleaning events that resulted in more energy from its solar panels, Spirit went on to function effectively over twenty times longer than NASA planners expected. Spirit also logged 7.73 km (4.8 mi) of driving instead of the planned 600 m (0.4 mi),Science.
On May 1, 2009 (5 years, 3 months, 27 Earth days after landing; 21 times the planned mission duration), Spirit became stuck in soft sand.extrication drives in an attempt to free itself. These efforts continued until January 26, 2010, when NASA officials announced that the rover was likely irrecoverably obstructed by its location in soft sand,
The primary surface mission for Spirit was planned to last at least 90 sols. The mission received several extensions and lasted about 2,208 sols. On August 11, 2007, Spirit obtained the second longest operational duration on the surface of Mars for a lander or rover at 1282 Sols, one sol longer than the Viking 2 lander. Viking 2 was powered by a nuclear cell whereas Spirit is powered by solar arrays. Until Opportunity overtook it on May 19, 2010, the Mars probe with longest operational period was Viking 1 that lasted for 2245 Sols on the surface of Mars. On March 22, 2010, Spirit sent its last communication, thus falling just over a month short of surpassing Viking 1"s operational record. An archive of weekly updates on the rover"s status can be found at the Spirit Update Archive.
Perform calibration and validation of surface observations made by Mars Reconnaissance Orbiter instruments. This will help determine the accuracy and effectiveness of various instruments that survey Martian geology from orbit.
NASA sought evidence of life on Mars, beginning with the question of whether the Martian environment was ever suitable for life. Life forms known to science require water, so the history of water on Mars is a critical piece of knowledge. Although the Mars Exploration Rovers did not have the ability to detect life directly, they offered very important information on the habitability of the environment during the planet"s history.
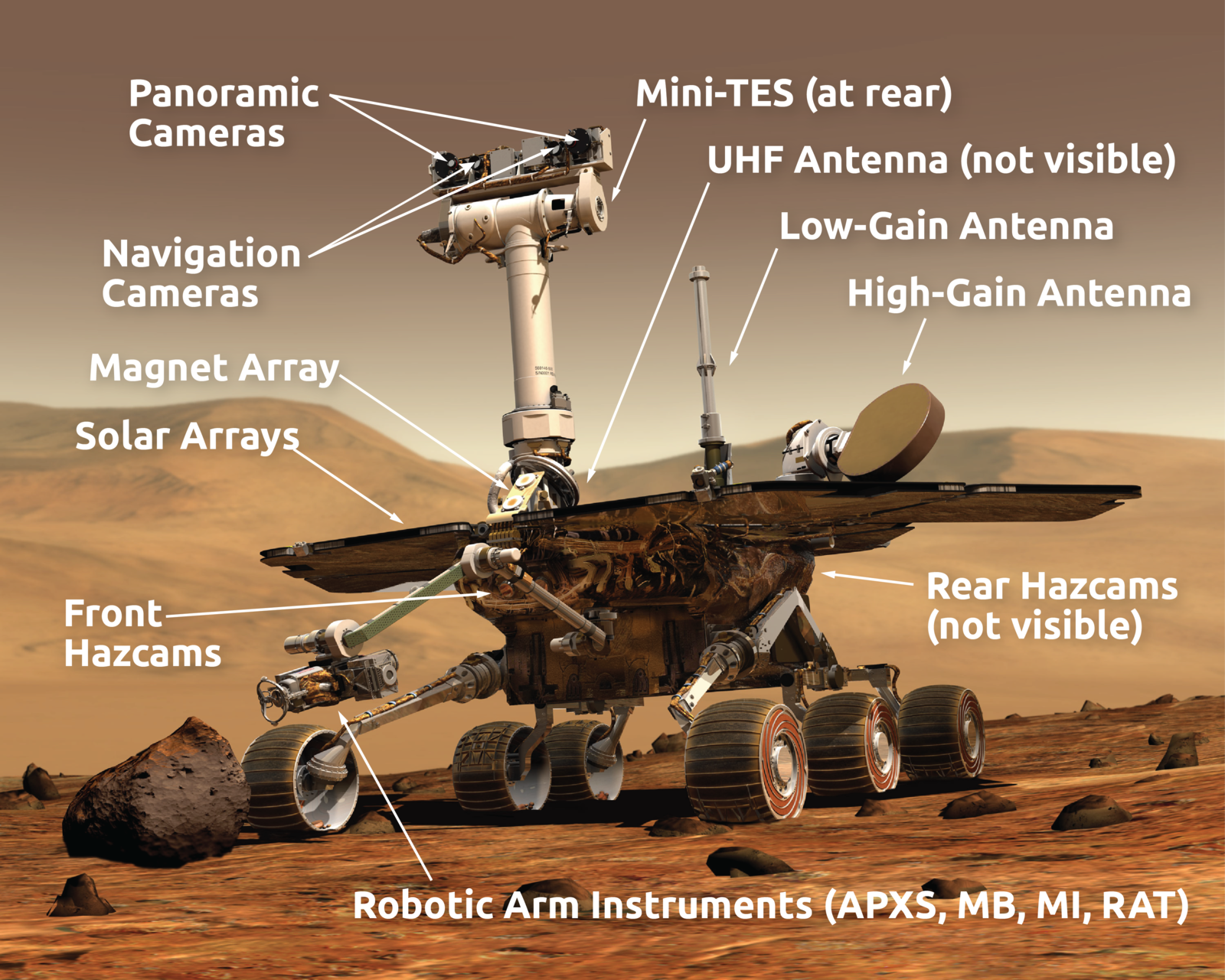
Spirit (and its twin, solar-powered robots standing 1.5 meters (4.9 ft) high, 2.3 meters (7.5 ft) wide and 1.6 meters (5.2 ft) long and weighing 180 kilograms (400 lb). Six wheels on a rocker-bogie system enabled mobility over rough terrain. Each wheel had its own motor. The vehicle was steered at front and rear and was designed to operate safely at tilts of up to 30 degrees. The maximum speed was 5 centimeters per second (2.0 in/s);Spirit and Opportunity have pieces of the fallen World Trade Center"s metal on them that were "turned into shields to protect cables on the drilling mechanisms".
Communications depended on an omnidirectional low-gain antenna communicating at a low data rate and a steerable high-gain antenna, both in direct contact with Earth. A low-gain antenna was also used to relay data to spacecraft orbiting Mars.
Miniature Thermal Emission Spectrometer (Mini-TES) – identified promising rocks and soils for closer examination, and determined the processes that formed them.
The Spirit Mars rover landed successfully on the surface of Mars on 04:35 SCET on January 4, 2004. This was the start of its 90-sol mission, but solar cell cleaning events would mean it was the start of a much longer mission, lasting until 2010.
"Sleepy Hollow," a shallow depression in the Mars ground at the right side of the above picture, was targeted as an early destination when the rover drove off its lander platform. NASA scientists were very interested in this crater. It is 9 meters (30 ft) across and about 12 meters (39 ft) north of the lander.
To the right is the first color image derived from images taken by the panoramic camera on the Mars Exploration Rover Spirit. It was the highest resolution image taken on the surface of another planet. According to the camera designer Jim Bell of Cornell University, the panoramic mosaic consists of four pancam images high by three wide. The picture shown originally had a full size of 4,000 by 3,000 pixels. However, a complete pancam panorama is even 8 times larger than that, and could be taken in stereo (i.e., two complete pictures, making the resolution twice as large again.) The colors are fairly accurate. (For a technical explanation, see colors outside the range of the human eye.)
On January 21, 2004 (sol 17), Spirit abruptly ceased communicating with mission control. The next day the rover radioed a 7.8 bit/s beep, confirming that it had received a transmission from Earth but indicating that the craft believed it was in a fault mode. Commands would only be responded to intermittently. This was described as a very serious anomaly, but potentially recoverable if it were a software or memory corruption issue rather than a serious hardware failure. Spirit was commanded to transmit engineering data, and on January 23 sent several short low-bitrate messages before finally transmitting 73 megabits via X band to
For the first intentional grinding of a rock on Mars, the Spirit team chose a rock called "Adirondack". To make the drive there, the rover turned 40 degrees in short arcs totaling 95 centimetres (37 in). It then turned in place to face the target rock and drove four short moves straightforward totaling 1.9 m (6 ft 3 in). Adirondack was chosen over another rock called "Sashimi", which was closer to the rover, as Adirondack"s surface was smoother, making it more suitable for the Rock Abrasion Tool (aka "RAT").
On March 5, 2004, NASA announced that Spirit had found hints of water history on Mars in a rock dubbed "Humphrey". Raymond Arvidson, the McDonnell University Professor and chair of Earth and Planetary Sciences at Washington University in St. Louis, reported during a NASA press conference: "If we found this rock on Earth, we would say it is a volcanic rock that had a little fluid moving through it." In contrast to the rocks found by the twin rover Opportunity, this one was formed from magma and then acquired bright material in small crevices, which look like crystallized minerals. If this interpretation holds true, the minerals were most likely dissolved in water, which was either carried inside the rock or interacted with it at a later stage, after it formed.
Spirit had now been on Mars for one Earth year and was driving slowly uphill towards the top of Husband Hill. This was difficult because there were many rocky obstacles and sandy parts. This led frequently to slippage and the route could not be driven as planned. In February, Spirit"s computer received a software update in order to drive more autonomously.Spirit arrived at a rock named "Peace" near the top of Cumberland Ridge. Spirit ground Peace with the RAT on sol 373. By sol 390 (mid-February 2005), Spirit was advancing towards "Larry"s Lookout", by driving up the hill in reverse. The scientists at this time were trying to conserve as much energy as possible for the climb.
On March 9, 2005 (probably during the Martian night), the rover"s solar panel efficiency jumped from the original ~60% to 93%, followed on March 10, by the sighting of dust devils. NASA scientists speculated a dust devil must have swept the solar panels clean, possibly significantly extending the duration of the mission. This also marked the first time dust devils had been spotted by Spirit or Opportunity. Dust devils had previously only been photographed by the
Mission members monitoring Spirit on Mars reported on March 12, 2005 (sol 421), that a lucky encounter with a dust devil had cleaned the robot"s solar panels. Energy levels dramatically increased and daily science work was anticipated to be expanded.
Video of a dust devil on Mars, photographed by Spirit. The counter in the bottom-left corner indicates time in seconds after the first photo was taken in the sequence. At the final frames, one can see that the dust devil has left a trail on the Martian surface. Four other dust devils also appear in the background.
The summit itself was flat. Spirit took a 360 degree panorama in real color, which included the whole Gusev crater. At night the rover observed the moons Phobos and Deimos in order to determine their orbits better.Spirit surveyed the Mars sky and the opacity of the atmosphere with its pancam to make a coordinated science campaign with the Hubble Space Telescope in Earth orbit.
From the peak Spirit spotted a striking formation, which was dubbed "Home Plate". This was an interesting target, but Spirit would be driven later to the McCool Hill to tilt its solar panels towards the Sun in the coming winter. At the end of October the rover was driven downhill and to Home Plate. On the way down Spirit reached the rock formation named "Comanche" on sol 690. Scientists used data from all three spectrometers to find out that about one-fourth of the composition of Comanche is magnesium iron carbonate. That concentration is 10 times higher than for any previously identified carbonate in a Martian rock. Carbonates originate in wet, near-neutral conditions but dissolve in acid. The find at Comanche is the first unambiguous evidence from the Mars Exploration Mission rovers for a past Martian environment that may have been more favorable to life than the wet but acidic conditions indicated by the rovers" earlier finds.
While at Low Ridge, Spirit imaged two rocks of similar chemical nature to that of Opportunity"s Heat Shield Rock, a meteorite on the surface of Mars. Named "Zhong Shan" for Sun Yat-sen and "Allan Hills" for the location in Antarctica where several Martian meteorites have been found, they stood out against the background rocks that were darker. Further spectrographic testing is being done to determine the exact composition of these rocks, which may turn out to also be meteorites.
Spirit"s dead wheel turned out to have a silver lining. As it was traveling in March 2007, pulling the dead wheel behind, the wheel scraped off the upper layer of the Martian soil, uncovering a patch of ground that scientists say shows evidence of a past environment that would have been perfect for microbial life. It is similar to areas on Earth where water or steam from hot springs came into contact with volcanic rocks. On Earth, these are locations that tend to teem with bacteria, said rover chief scientist Steve Squyres. "We"re really excited about this," he told a meeting of the American Geophysical Union (AGU). The area is extremely rich in silica–the main ingredient of window glass. The researchers have now concluded that the bright material must have been produced in one of two ways. One: hot-spring deposits produced when water dissolved silica at one location and then carried it to another (i.e. a geyser). Two: acidic steam rising through cracks in rocks stripped them of their mineral components, leaving silica behind. "The important thing is that whether it is one hypothesis or the other, the implications for the former habitability of Mars are pretty much the same," Squyres explained to BBC News. Hot water provides an environment in which microbes can thrive and the precipitation of that silica entombs and preserves them. Squyres added, "You can go to hot springs and you can go to fumaroles and at either place on Earth it is teeming with life – microbial life."
Towards the end of June 2007, a series of dust storms began clouding the Martian atmosphere with dust. The storms intensified and by July 20, both Spirit and Opportunity were facing the real possibility of system failure due to lack of energy. NASA released a statement to the press that said (in part) "We"re rooting for our rovers to survive these storms, but they were never designed for conditions this intense".Opportunity, and slightly more to Spirit.
On November 10, 2008, a large dust storm further reduced the output of the solar panels to 89 watt-hours (320 kJ) per day—a critically low level.Spirit would survive the storm, and that the energy level would rise once the storm had passed and the skies started clearing. They attempted to conserve energy by shutting down systems for extended periods of time, including the heaters. On November 13, 2008, the rover awoke and communicated with mission control as scheduled.
From November 14, 2008, to November 20, 2008 (sols 1728 to 1734), Spirit averaged 169 watt-hours (610 kJ) per day. The heaters for the thermal emission spectrometer, which used about 27 watt-hours (97 kJ) per day, were disabled on November 11, 2008. Tests on the thermal emission spectrometer indicate that it was undamaged, and the heaters would be enabled with sufficient energy.solar conjunction, where the Sun is between Earth and Mars, started on November 29, 2008, and communication with the rovers was not possible until December 13, 2008.
JPL team members simulated the situation by means of a rover mock-up and computer models in an attempt to get the rover back on track. To reproduce the same soil mechanical conditions on Earth as those prevailing on Mars under low gravity and under very weak atmospheric pressure, tests with a lighter version of a mock-up of Spirit were conducted at JPL in a special sandbox to attempt to simulate the cohesion behavior of poorly consolidated soils under low gravity.
On December 17, 2009 (sol 2116), the right-front wheel suddenly began to operate normally for the first three out of four rotations attempts. It was unknown what effect it would have on freeing the rover if the wheel became fully operational again. The right rear wheel had also stalled on November 28 (sol 2097) and remained inoperable for the remainder of the mission. This left the rover with only four fully operational wheels.
On January 26, 2010 (sol 2155), after several months attempting to free the rover, NASA decided to redefine the mobile robot mission by calling it a stationary research platform. Efforts were directed in preparing a more suitable orientation of the platform in relation to the Sun in an attempt to allow a more efficient recharge of the platform"s batteries. This was needed to keep some systems operational during the Martian winter.
It is likely that Spirit experienced a low-power fault and had turned off all sub-systems, including communication, and gone into a deep sleep, trying to recharge its batteries. It is also possible that the rover had experienced a mission clock fault. If that had happened, the rover would have lost track of time and tried to remain asleep until enough sunlight struck the solar arrays to wake it. This state is called "Solar Groovy." If the rover woke up from a mission clock fault, it would only listen. Starting on July 26, 2010 (sol 2331), a new procedure to address the possible mission clock fault was implemented.
Each sol, the Deep Space Network mission controllers sent a set of X-band "Sweep & Beep" commands. If the rover had experienced a mission clock fault and then had been awoken during the day, it would have listened during brief, 20-minute intervals during each hour awake. Due to the possible clock fault, the timing of these 20-minute listening intervals was not known, so multiple "Sweep & Beep" commands were sent. If the rover heard one of these commands, it would have responded with an X-band beep signal, updating the mission controllers on its status and allowing them to investigate the state of the rover further. But even with this new strategy, there was no response from the rover.
JPL continued attempts to regain contact with Spirit until May 25, 2011, when NASA announced the end of contact efforts and the completion of the mission.Spirit were transitioned to support Spirit"s then still-active Opportunity rover,
Rocks of the plains also resemble the basaltic shergottites, meteorites that came from Mars. One classification system compares the amount of alkali elements to the amount of silica on a graph; in this system, Gusev plains rocks lie near the junction of basalt, picrobasalt, and tephrite. The Irvine-Barager classification calls them basalts.
After Spirit stopped working scientists studied old data from the Miniature Thermal Emission Spectrometer, or Mini-TES and confirmed the presence of large amounts of carbonate-rich rocks, which means that regions of the planet may have once harbored water. The carbonates were discovered in an outcrop of rocks called "Comanche."
In summary, Spirit found evidence of slight weathering on the plains of Gusev, but no evidence that a lake was there. However, in the Columbia Hills there was clear evidence for a moderate amount of aqueous weathering. The evidence included sulfates and the minerals goethite and carbonates that only form in the presence of water. It is believed that Gusev crater may have held a lake long ago, but it has since been covered by igneous materials. All the dust contains a magnetic component that was identified as magnetite with some titanium. Furthermore, the thin coating of dust that covers everything on Mars is the same in all parts of Mars.
Night sky of Mars showing Deimos (left) and Phobos (right) in front of Sagittarius, as seen by Mars Exploration Rover Spirit on August 26, 2005. For full animation see Image:Phobos & Deimos full.gif
Spirit pointed its cameras towards the sky and observed a transit of the Sun by Mars" moon Deimos (see Transit of Deimos from Mars). It also took the first photo of Earth from the surface of another planet in early March 2004.
In late 2005, Spirit took advantage of a favorable energy situation to make multiple nighttime observations of both of Mars" moons Phobos and Deimos.lunar" (or rather phobian) eclipse as Spirit watched Phobos disappear into Mars" shadow. Some of Spirit"s star gazing was designed to look for a predicted meteor shower caused by Halley"s Comet, and although at least four imaged streaks were suspect meteors, they could not be unambiguously differentiated from those caused by cosmic rays.
A transit of Mercury from Mars took place on January 12, 2005, from about 14:45 UTC to 23:05 UTC. Theoretically, this could have been observed by both Spirit and 6.1" angular diameter. They were able to observe transits of Deimos across the Sun, but at 2" angular diameter, Deimos is about 20 times larger than Mercury"s 6.1" angular diameter. Ephemeris data generated by JPL Horizons indicates that Opportunity would have been able to observe the transit from the start until local sunset at about 19:23 UTC Earth time, while Spirit would have been able to observe it from local sunrise at about 19:38 UTC until the end of the transit.
Both rovers passed their original mission time of 90 sols many times over. The extended time on the surface, and therefore additional stress on components, resulted in some issues developing.
Scientific instruments also experienced degradation as a result of exposure to the harsh Martian environment and use over a far longer period than had been anticipated by the mission planners. Over time, the diamond in the resin grinding surface of the Rock Abrasion Tool wore down, after that the device could only be used to brush targets.Spirit"s life, the MIMOS II Mössbauer spectrometer took much longer to produce results than it did earlier in the mission because of the decay of its cobalt-57 gamma ray source that has a half life of 271 days.
To commemorate Spirit"s great contribution to the exploration of Mars, the asteroid 37452 Spirit has been named after it.Ingrid van Houten-Groeneveld who along with Cornelis Johannes van Houten and Tom Gehrels discovered the asteroid on September 24, 1960.
Reuben H. Fleet Science Center and the Liberty Science Center also have an IMAX show called Roving Mars that documents the journey of both Spirit and Opportunity, using both CG and actual imagery.
On January 27, 2004 (sol 22) NASA memorialized the crew of Apollo 1 by naming three hills to the north of "Columbia Memorial Station" as the Apollo 1 Hills. On February 2, 2004 (sol 28) the astronauts on Space Shuttle Columbia"s final mission were further memorialized when NASA named a set of hills to the east of the landing site the Columbia Hills Complex, denoting seven peaks in that area as "Anderson", "Brown", "Chawla", "Clark", "Husband", "McCool", and "Ramon" in honour of the crew; NASA has submitted these geographical feature names to the IAU for approval.
Spirit"s West Valley panorama (color not rectificated for media). NASA"S Mars Exploration Rover Spirit captured this westward view from atop a low plateau where Spirit spent the closing months of 2007.
"NASA Spirit Rover Completes Mission on Mars" (Press release). Jet Propulsion Laboratory. May 25, 2011. Archived from the original on June 11, 2011. Retrieved May 26, 2011.
Amos, Jonathan (January 26, 2010). "Nasa accepts Spirit Mars rover "stuck for good"". BBC News. The US space agency (Nasa) has conceded defeat in its battle to free the Spirit rover from its Martian sand trap. The vehicle became stuck in soft soil back in May last year and all the efforts to extricate it have failed.
Brown, Dwayne; Webster, Guy (January 26, 2010). "Now a Stationary Research Platform, NASA"s Mars Rover Spirit Starts a New Chapter in Red Planet Scientific Studies". . Retrieved January 26, 2010. Washington – After six years of unprecedented exploration of the Red Planet, NASA"s Mars Exploration Rover Spirit no longer will be a fully mobile robot. NASA has designated the once-roving scientific explorer a stationary science platform after efforts during the past several months to free it from a sand trap have been unsuccessful.
Golombek; et al. Surfical geology of the Spirit rover traverse in Gusev Crater: dry and desiccating since the Hesperian (PDF). Second Conference on Early Mars (2004). p. 1. Retrieved January 26, 2009. The rim is ~3 meters (9.8 ft) high and although the crater is shallow (~10 meters (33 ft) deep)
"Mars Exploration Rover Mission: All Spirit Updates". marsrovers.jpl.nasa.gov. Archived from the original on June 25, 2007. Retrieved November 21, 2013.
"Mars Exploration Rover Mission: All Spirit Updates". marsrovers.jpl.nasa.gov. Archived from the original on November 23, 2013. Retrieved November 21, 2013.
"Mars Exploration Rover Mission: All Spirit Updates". marsrovers.jpl.nasa.gov. Archived from the original on November 23, 2013. Retrieved November 21, 2013.
Amos, Jonathan (December 11, 2007). "Mars robot unearths microbe clue". NASA says its robot rover Spirit has made one of its most significant discoveries on the surface of Mars. BBC News. Retrieved December 12, 2007.
Bertster, Guy (December 10, 2007). "Mars Rover Investigates Signs of Steamy Martian Past". Press Release. Jet Propulsion Laboratory, Pasadena, California. Retrieved December 12, 2007.
Planetary.org Archived April 20, 2012, at the Wayback Machine Emily Lakdawalla, Teeny little Bigfoot on Mars, January 23, 2008 | 12:41 PST | 20:41 UTC
"NASA"s Mars Rover has Uncertain Future as Sixth Anniversary Nears". NASA. December 31, 2009. Archived from the original on March 18, 2012. Retrieved January 1, 2010.
Bertelsen, P.; Goetz, W; Madsen, MB; Kinch, KM; Hviid, SF; Knudsen, JM; Gunnlaugsson, HP; Merrison, J; et al. (2004). "Magnetic Properties on the Mars Exploration Rover Spirit at Gusev Crater". Science. 305 (5685): 827–829. Bibcode:2004Sci...305..827B. doi:10.1126/science.1100112. PMID 15297664. S2CID 41811443.
Ming, D. W.; Mittlefehldt, D. W.; Morris, R. V.; Golden, D. C.; Gellert, R.; Yen, A.; Clark, B. C.; Squyres, S. W.; et al. (2006). "Geochemical and mineralogical indicators for aqueous processes in the Columbia Hills of Gusev crater, Mars". Journal of Geophysical Research. 111 (E2): n/a. Bibcode:2006JGRE..111.2S12M. doi:10.1029/2005JE002560. hdl:
Christensen, P.R. (2005) Mineral Composition and Abundance of the Rocks and Soils at Gusev and Meridiani from the Mars Exploration Rover Mini-TES Instruments AGU Joint Assembly, May 23–27, 2005 http://www.agu.org/meetings/sm05/waissm05.html Archived May 13, 2013, at the Wayback Machine
COLE, Shoshanna B., et al. 2015. In-situ Evidence for Alteration by Acid Fog on Husband Hill, Gusev Crater, Mars. 2015 GSA Annual Meeting in Baltimore, Maryland, USA (November 1–4, 2015) Paper No. 94-10
Morris, R. V.; Klingelhöfer, G.; Schröder, C.; Rodionov, D. S.; Yen, A.; Ming, D. W.; De Souza, P. A.; Fleischer, I.; et al. (2006). "Mössbauer mineralogy of rock, soil, and dust at Gusev crater, Mars: Spirit"s journey through weakly altered olivine basalt on the plains and pervasively altered basalt in the Columbia Hills". Journal of Geophysical Research. 111 (E2): n/a. Bibcode:2006JGRE..111.2S13M. doi:10.1029/2005JE002584. hdl:
Morris, R. V.; Ruff, S. W.; Gellert, R.; Ming, D. W.; Arvidson, R. E.; Clark, B. C.; Golden, D. C.; Siebach, K.; et al. (2010). "Identification of Carbonate-Rich Outcrops on Mars by the Spirit Rover". Science. 329 (5990): 421–4. Bibcode:2010Sci...329..421M. doi:10.1126/science.1189667. PMID 20522738. S2CID 7461676.

According to NASA, “The mission takes the next step by not only seeking signs of habitable conditions on Mars in the ancient past, but also searching for signs of past microbial life itself.”
All four science objectives for the Mars 2020 mission relate to searching for signs of life on Mars, making it the first such probe with an explicit search for life built into its mission.
Determine whether life ever existed on Mars: the rover is looking for preserved signs of life in an area of Mars that may have been favourable to life in the planet’s past.
Characterise the climate of Mars: the rover’s instruments are investigating past Martian climate conditions, and searching for ancient signs that the planet was once habitable, building on research conducted by the Curiosity rover.
Characterise the geology of Mars:a special drilling tool included in the rover is collecting rock samples, sealing and storing them on the Martian surface. These ‘cached’ samples could then be retrieved during future missions to Mars and sent back to Earth where the samples can be studied in far more detail.
Prepare for human exploration of Mars:the rover includes experimental technology that is attempting to produce oxygen from the Martian atmosphere. This capability could pave the way for future human missions to Mars.
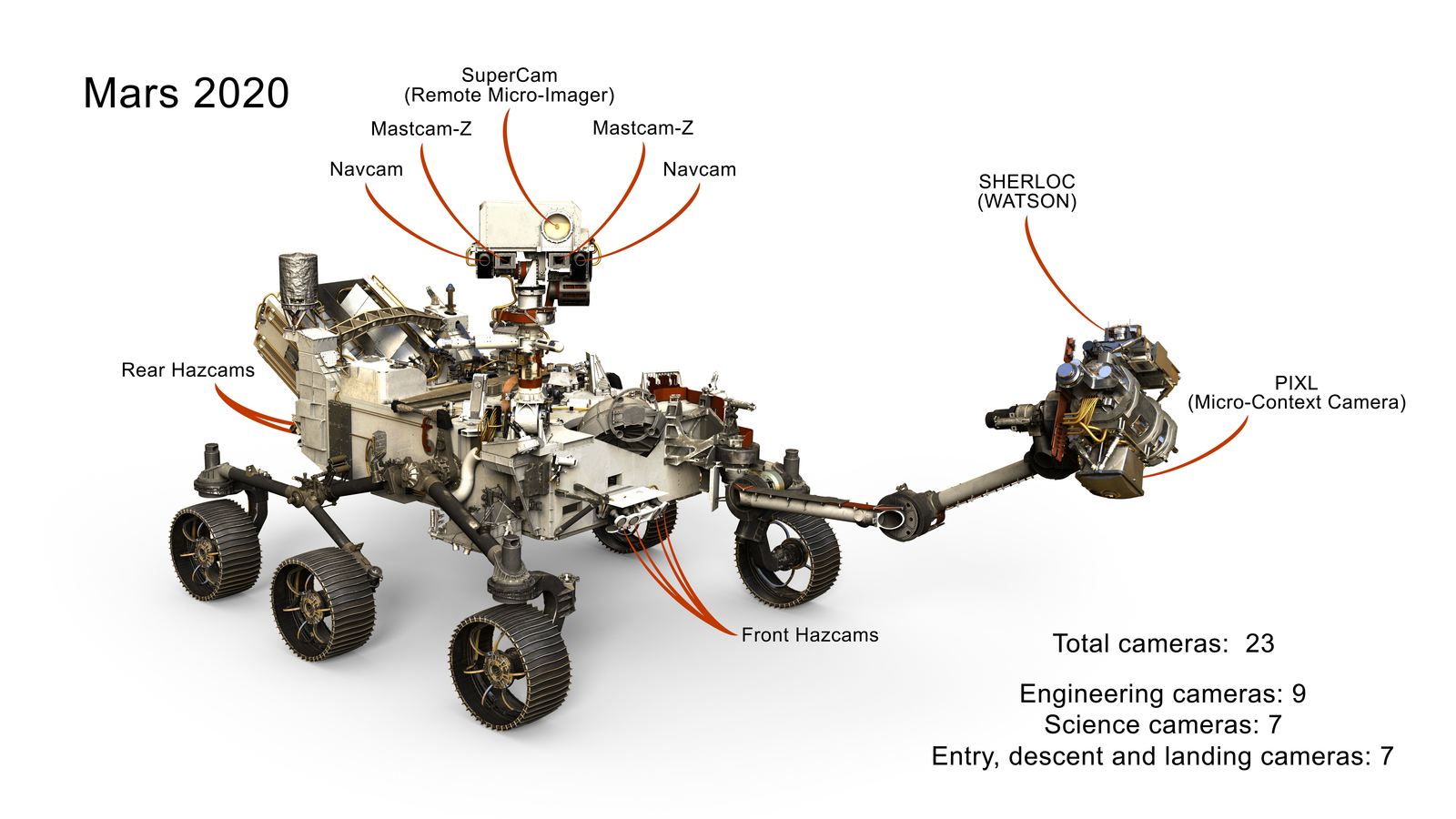
These include an advanced ultraviolet scanner and microscopic camera known as SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals). Just like its detective namesake, SHERLOC is looking for the tiniest clues that could help solve the mystery of past life on Mars. It is also carrying samples of astronaut spacesuit material, testing to see whether they can withstand the harsh Martian environment.
Another experiment called MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment) is being used at various times to produce oxygen from carbon dioxide in the Martian atmosphere. If oxygen can be extracted from the atmosphere, it could be used in future human missions to provide oxygen to astronauts and possibly be used in other technologies such as transport systems on the planet.
The rover also includes a small autonomous helicopter called Ingenuity. Originally a technology demonstration to confirm that powered flight on Mars was possible, it has now taken dozens of flights across the Martian surface and is being used to explore semi-independently of Perseverance.
The team in charge of defining the mission for NASA"s next Mars rover says the Curiosity-like machine should look for signs of past life and gather samples of rock and soil for eventual return to Earth.
Such a sample return mission has been on NASA"s agenda for more than a decade, but it has always lost out due to the technical challenges and limited budgets.
Multi-mission planThe rover due for launch in 2020 would perform only the first step in a multi-mission plan, as envisioned by the science definition team: The six-wheeled machine could drill out as many as 31 core samples of rock and soil, and put them in storage. Years later, future probes could transport the samples back to Earth for study.
The team said the 2020 rover, which has not yet been formally named, should target "a site on Mars that likely was once habitable" and look for the chemical signatures of past life. It should also collect "critical data needed to plan for eventual human missions to the Martian surface." The current plan for human exploration calls for trips to Mars and its moons to begin in the 2030s.
"Crafting the science and exploration goals is a crucial milestone in preparing for our next major Mars mission," John Grunsfeld, NASA"s associate administrator for science, said in a news release. "The objectives determined by NASA with the input from this team will become the basis later this year for soliciting proposals to provide instruments to be part of the science payload on this exciting step in Mars exploration."
Grunsfeld told reporters that the details for the actual sample return still have to be worked out, and may involve joint missions with international partners. "I wouldn"t rule out that perhaps human explorers will go and retrieve the cache 20-plus years from now. ... We don"t have a requirement that we bring samples back before we send people," he said.
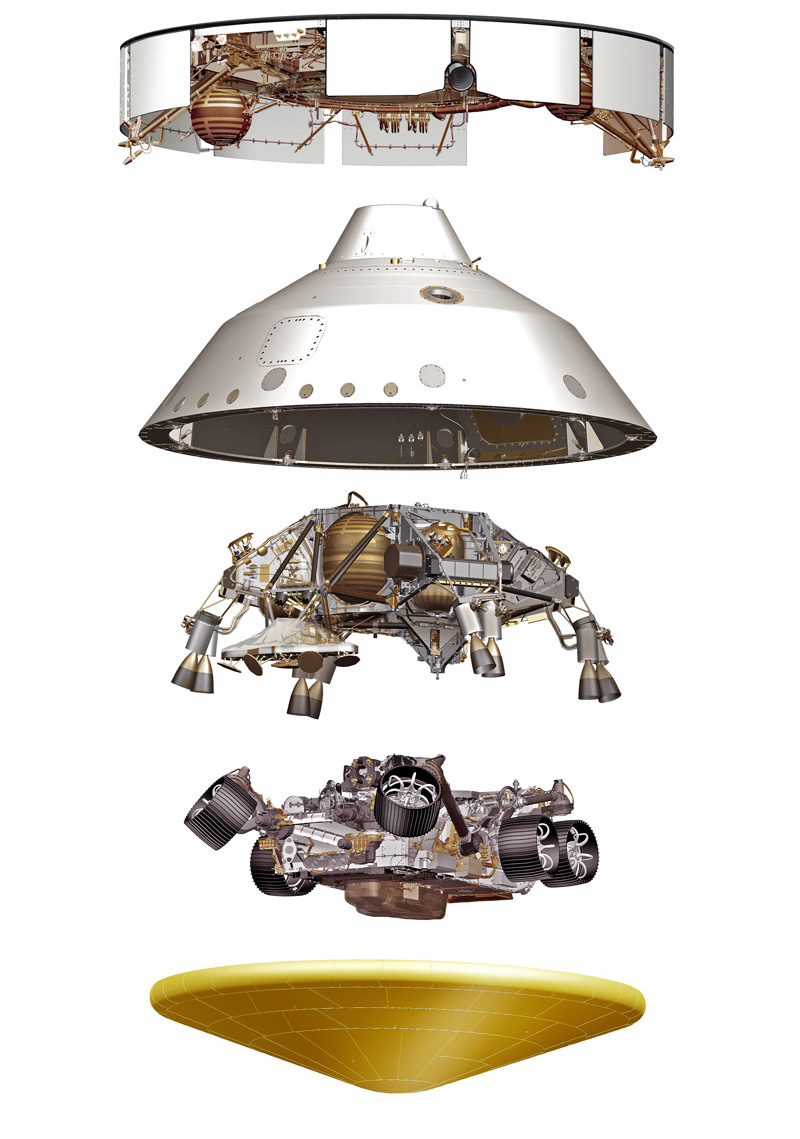
Based on CuriosityThe 2020 rover would be based on the design used for NASA"s nuclear-powered Curiosity rover, which was delivered to the Red Planet using an innovative sky-crane system. Curiosity"s Mars Science Laboratory mission cost $2.5 billion, but NASA says the 2020 rover"s mission could be done for $1.5 billion because of the savings on design and parts.
Funding is a major concern for NASA"s Mars exploration program: Last year, the space agency had to make drastic reductions in its contribution to the European-led Exomars effort due to budgetary restraints. Between now and 2020, NASA is planning two smaller-scale missions to Mars: the $670 million Mars MAVEN orbiter, which is due for launch this fall to study changes in the Red Planet"s atmosphere; and the $425 million InSight lander, which would go to Mars in 2016 to study its deep interior.
Update for 5:30 p.m.ET July 9: During a teleconference with reporters, Grunsfeld and other experts involved in planning the 2020 mission faced repeated questions about the plan to look for signs of past life rather than seeking out extant life — that is, organisms that may be living on Mars today.
Update for 2:25 p.m. ET July 10: I"ve revised the description of future sample return missions to reflect the fact that the specific plan for getting the samples back to Earth has not yet been laid out.
If all goes according to plan, the landing of the Mars 2020 Perseverancerover (“Percy”) tomorrow (February 18, 2021) will mark the start of NASA’s ninth surface mission on the Red Planet. Percy will touch down in Jezero crater on Mars, where she will set off exploring new and uncharted terrains in search of ancient signs of life. Nearly 60 years have passed since the first spacecraft were sent to Mars, and it’s inspiring (albeit sometimes unbelievable) to reflect on the progress that has been made since then. First, we sent spacecraft to fly-by, then to orbit, then to land, and finally to rove. As we’ve become more familiar with Mars over time, and as our technological capabilities have improved, our methods of and goals for exploration have evolved in turn. And with each new mission, humans have pushed the boundaries a little more—or in the case of Percy, a lot more. Here I highlight three new (and particularly challenging) aspects of the Mars 2020 mission that distinguish it from previous missions and that have the potential to significantly impact the future of Mars exploration.
This illustration depicts NASA"s Perseverance rover operating on the surface of Mars. Perseverance will land at the Red Planet"s Jezero Crater a little after 3:40 p.m. EST (12:40 p.m. PST) on Feb. 18, 2021.
One of the primary objectives of the Perseverancemission is to act as the first leg in a Mars Sample Return (MSR) campaign that is being planned jointly by NASA and the European Space Agency. The rover"s role in this interplanetary relay race will be to collect scientifically compelling rock samples and to place these samples in designated locations on the surface. Eventually, another rover will be sent to Jezero crater to retrieve the samples that Percy stockpiled. This fetch rover will then transfer these samples into a Mars Ascent Vehicle (MAV) that will launch into orbit and rendezvous with an Earth return orbiter; one last handoff between the spacecraft, and the samples will be on their way back to Earth. Pretty cool, huh?
But let’s be clear. MSR is complex—technologically and logistically. Sample collection alone relies on an incredibly intricate and multifaceted robotic system: first the rover arm is used to drill a rock and collect drilled material in a small sample tube; the sample is then transferred into the rover’s body to undergo a series of inspections; finally, the sample tube arrives at the sealing station, where it gets hermetically sealed for the trip back home. Every step of this process requires extreme precision, and Percy may perform this task more than thirty times during her mission. Of course, Percy isn"t totally autonomous, so there will also be some very real challenges for us humans to make decisions regarding where to drive, which rocks to drill (and which not to drill), and where to stash samples so that they can be accessed by the fetch rover. These decisions will spark healthy debate amongst the team, no doubt, but I would expect no less given the gravity of the task at hand. The rover can only collect a finite number of samples, and how the team chooses to handle those samples will have an impact not only on the success of this mission but on the success of the MSR campaign as a whole. This distinguishes Perseverance from prior Mars missions and increases the stakes even more.
Even if Perseveranceflawlessly executes her portion of the MSR campaign, there will be a great deal more work required to get the samples back to Earth. It will take a lot of time and money, multiple missions, and n



 8613371530291
8613371530291