
mud pump displacement formula made in china

Rig pump output, normally in volume per stroke, of mud pumps on the rig is one of important figures that we really need to know because we will use pump out put figures to calculate many parameters such as bottom up strokes, wash out depth, tracking drilling fluid, etc. In this post, you will learn how to calculate pump out put for triplex pump and duplex pump in bothOilfield and Metric Unit.

Positive displacements pumps are generally used on drilling rigs to pump high pressure and high volume of drilling fluids throughout a drilling system. There are several reasons why the positive displacement mud pumps are used on the rigs.
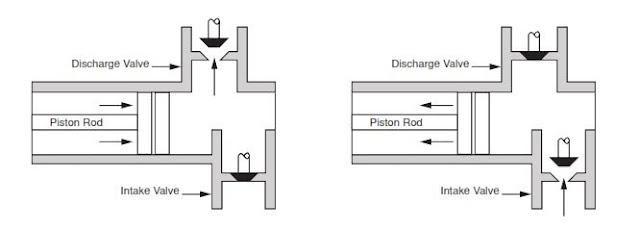
The duplex pumps (Figure 1) have two cylinders with double acting. It means that pistons move back and take in drilling mud through open intake valve and other sides of the same pistons, the pistons push mud out through the discharge valves.
When the piston rod is moved forward, one of intake valves is lift to allow fluid to come in and one of the discharge valve is pushed up therefore the drilling mud is pumped out of the pump (Figure 2).
On the other hand, when the piston rod is moved backward drilling fluid is still pumped. The other intake and discharge valve will be opened (Figure 3).
The triplex pumps have three cylinders with single acting. The pistons are moved back and pull in drilling mud through open intake valves. When the pistons are moved forward and the drilling fluid is pushed out through open discharge valves.
On the contrary when the piston rods are moved backward, the intake valve are opened allowing drilling fluid coming into the pump (Figure 6). This video below shows how a triplex mud pump works.
Because each pump has power rating limit as 1600 hp, this will limit capability of pump. It means that you cannot pump at high rate and high pressure over what the pump can do. Use of a small liner will increase discharge pressure however the flow rate is reduces. Conversely, if a bigger liner is used to deliver more flow rate, maximum pump pressure will decrease.
As you can see, you can have 7500 psi with 4.5” liner but the maximum flow rate is only 297 GPM. If the biggest size of liner (7.25”) is used, the pump pressure is only 3200 psi.
Finally, we hope that this article would give you more understanding about the general idea of drilling mud pumps. Please feel free to add more comments.

REASON: This is the mud engineers Bible on the rig. It is based on prior knowledge of all drilling parameters and gives you a step by step plan for present well being drilled. It would guide you all though the drilling process.
Study your silos, pits, mud tanks, storage tank names, its contents, volume, dead volume capacity, properties of their contents (mud: especially Mud weight).
REASON: You don’t want to be taken unawares, you need to know the type of mud you have in each pit (where your backup mud is, kill mud if any, premix, etc.), you need to be sure you have enough mud to reach TD (Total depth) most especially if the logistics of transporting mud to the rig n’est pas facile, or takes days to arrive. Finally without knowing the properties of the mud you are introducing to the active system you would not be sure if what is affecting your active mud system is coming from the formation or from the mud you are introducing to the active mud.
REASON: If there’s going to be a rig operation such as displacement, or cement job that requires you to bypass fluids to different pits or dump fluids (to avoid contamination) you need to know your lines and valves and where it leads to before such operations.
REASON: You need to be sure the shaker screens can handle the flow if the mud is cold if not temporarily screen down to a lower size mesh or ask the driller to reduce the flow rate if permissible.
REASON: Drilling fluids would normally splash the rig crew on the rig floor while pulling and racking back pipes when a stand is removed from the drill string. So a slug (same mud but with 2-2.5 ppg higher density) would be prepared in the slug tank, and pumped into the drill string. This keeps the fluids level inside the drill pipe below the surface when tripping drill pipe.
For a leak off test (LOT), the mud has to be circulated to obtain uniform weight and condition. The primary concern for the mud engineer is to ensure an equal mud weight all through the mud. Mud weight going in to the hole should be equal to mud weight coming out of the hole at the shakers.
REASON: The well needs to be properly monitored. Instead speak with the mud loggers to convert the pit you want to transfer fluid from to the active system from a Reserve pit to an Active pit on their system then you can gradually make your transfers that way all volumes would be shown as active pit volume.
REASON: It’s used to measure the relative stability of a water-in-oil emulsion. With increase of water, the E.S drops this would be a clear indication of WBM coming on surface, same the other way round, with decrease of water the E.S value climbs. But before the displacement take the initial E.S values of the concerned fluids so as to have an idea what to expect.
REASON: If the amount and average specific gravity of the solids in both fluids (i.e. the density) are different the mud weight would be a good indicator of the fluids interface during a displacement.
REASON: Calculate your hole volume, that means equal amount of mud on surface will leave you pit, so get the derrick man or personnel assisting you in the pit room to inform you when hole volume has been pumped.
REASON: Using a technique called nephelometry the turbidity can be measured. When light hits a particle the energy is scattered in all directions, it measures the level of light scattered by particles at right angles to the incident light beam. Initial NTU readings of both fluids would be the reference point for identification. After the Hi-vis passes through the driller should be told to stop pumping when the initial NTU of the filtered brine has been achieved.
For water based mud with a low alkalinity use phenolphthalein also. Add it to the mud and check for change of color to pink to know when traces of cement are on surface.
REASON: Note differences in weight between mud, spacer and cement before displacement of cement. The mud weight difference between the three fluids is a good indicator of the fluids interface on surface.
REASON: The first step is removal of cuttings from the borehole and the drilling fluid after which the mud should be condition before placing cement in the wellbore, either the density (not compromising well control) or the rheology depending on the situation. For the rheology, the yield stress, gel strength and plastic viscosity would be reduced hence reducing the driving forces necessary to displace mud with increased mud flexibility while being careful to prevent barite settling.
REASON: With no pit space to store the equivalent mud volume being replaced down hole, all pit levels should be recorded at all stages during the cement job. You would need to visit the pit room and return to the cement unit (while measuring cement density) at appropriate moments.
Measure all tank volumes before cement job i.e. when the mud has been thinned down and pump has been stopped (pit static). In case of leaks or valve mistakes all pits should be recorded.
If we get full returns during cementing it means that the cement displaced equal amount of mud and there was no loss down hole due to the cement job or due to displacement.
Prior to running casing, calculate the displacement of the casing first to know the volume it would displace, calculating from the mud line up to the casing depth.
REASON: There would be returns to the pit while running in hole casing, so set a pit ready to receive the displacement from the casing and measure its volume or measure the entire surface volume in case of any fluids transfer in your absence. Trace the losses, Get the current depth (measured Depth), and measure all the pits, when you know the subsequent increment of the pit it should tally with the displacement of the steel, i.e. if there are no losses.
REASON: From the cement program calculate the total volume of the fluids /cement that would be pumped into the hole that is not mud so as to confirm tank space to receive equal volume from the hole. If no available tank space/storage space then OBM should be back-loaded before the cement job to create space.
REASON: If it’s the pay zone, losses would require the use of acid-soluble LCM to prevent formation damage. Also considering down hole tools and motors, certain concentrations of LCM pills would not be pumped to avoid plugging/damaging the tools unless a bypass tool is part of the BHA.
Bit balling occurs in soft gumbo / swelling shales while drilling, the shale adsorbs water from the mud it then becomes plastic with a ball of compacted shale building up and covering the whole bit, stabilizers and drill collars, thus preventing further drilling progress.
To be certain it’s a bit balling issue we are dealing with the mud engineer should observe some of the following or collect the following information from the following rig personnel, with the first 3 information from the driller being very important:
To prevent bit balling from occurring it is advisable to adopt procedures that worked in your geographical area in overcoming bit balling by always reviewing previous drilling mud report (DMR).
· Use mud system that can inhibit clay swelling example: Formulating KCl mud with PHPA (to avoid using higher concentrations of KCl) in which KCl prevents clay swelling while PHPA (partially hydrolyzed polyacrylamide ) coats the shales surfaces (encapsulates) thereby inhibiting their dispersion and incorporation into the mud.7
· “When drilling gumbo, the pH should be maintained at 9.0-10.0. If bit balling occurs, increase the mud alkalinity (PM) to 5 or more with lime”.8
· “If all else fails, before you trip out of the hole, you might pump a walnut-hull sweep. It will tend to sandblast the bit and remove the ball, and won’t hurt the mud. Don’t try this if you are running small jets in the bit, as plugging can be an issue.”11
A Drilling fluids Engineer should be able to observe or carry out a test and subsequently identify the reason for a high or a low mud weight in a water-base mud or an oil-base mud system.
Before looking at the reason why the mud weight reduced or increased from the given mud program specification, it’s good to know that the major function of drilling fluids is to provide sufficient pressure to check influx of gas, oil, and water into the well bore from the drilled formation.
The hydrostatic head of the mud column must be at least equal to that of the formation pressure, and hopefully greater, but not so high as to cause loss of circulation (except where an over balanced / under balanced drilling are specifically desired).
The mud weight materials could be barite, calcium carbonate or soluble salts such as sodium chloride (NaCl), potassium chloride (KCl) and calcium chloride (CaCl2). Sometimes the desired mud weight can be achieved by combining additions of salts and barite.
a. Mud Weight (Density) Test: The mud balance may indicate that mud weight is too high or too low. b. Retort Test: The test may indicate that the percent solids by volume is high, and your solids content calculations (lb/bbl low and high gravity solids) may indicate that barite content is too high or too low. c. Rheology tests: Indicates increase or decrease in viscosity
a. Increase in pump pressure: This can indicate an increase in Mud weight. b. Change in penetration rate: Increase in penetration rate may indicate decrease in mud weight while decrease in penetration rate may indicate increase in mud weight. c. Gas bubbles: This definitely indicates decrease in mud weight.

This article will focus on understanding of MWD signal decoding which is transmitted via mud pulse telemetry since this method of transmission is the most widely used commercially in the world.
As a basic idea, one must know that transmitted MWD signal is a wave that travels through a medium. In this case, the medium is mud column inside the drill string to mud pumps. Decoding is about detecting the travelling wave and convert it into data stream to be presented as numerical or graphical display.
The signal is produced by downhole transmitter in the form of positive pulse or negative pulse. It travels up hole through mud channel and received on the surface by pressure sensor. From this sensor, electrical signal is passed to surface computer via electrical cable.
Noise sources are bit, drill string vibration, bottom hole assemblies, signal reflection and mud pumps. Other than the noises, the signal is also dampened by the mud which make the signal becomes weak at the time it reaches the pressure sensor. Depth also weaken the signal strength, the deeper the depth, the weaker the signal detected.
Rock bit may create tri-lobe pattern. This pattern is created by the cones of the bit on the bottom of the hole. While drilling, the bit’s cones ride along this tri-lobe pattern and makes the bit bounce or known as axial vibration. As the bit bounces, back pressure is produced at the bit nozzles and transmitted to surface. The frequency of the noise created by bit bounce correlates with bit RPM. The formula to calculate its frequency is 3*(bit RPM)/60. When the bit bounce frequency match with MWD signal frequency, decoding is affected.
BHA components that have moving mechanical parts such as positive mud motor and agitator create noise at certain frequency. The frequency produced by these assemblies depends on the flow rate and the lobe configuration. The higher the flow rate and the higher the lobe configuration creates higher noise frequency.
Thruster, normally made up above MWD tool, tends to dampen the MWD signal significantly. It has a nozzle to use mud hydraulic power to push its spline mandrel – and then push the BHA components beneath it including the bit – against bottom of the hole. When the MWD signal is passing through the nozzle, the signal loses some of its energy. Weaker signal will then be detected on surface.
The common sources of signal reflection are pipe bending, change in pipe inner diameter or closed valve. These are easily found in pipe manifold on the rig floor. To avoid the signal reflection problem, the pressure sensor must be mounted in a free reflection source area, for example close to mud pumps. The most effective way to solve this problem is using dual pressure sensors method.
Mud pump is positive displacement pump. It uses pistons in triplex or duplex configuration. As the piston pushes the mud out of pump, pressure spikes created. When the piston retracts, the pressure back to idle. The back and forth action of pistons produce pressure fluctuation at the pump outlet.
Pressure fluctuation is dampened by a dampener which is located at the pump outlet. It is a big rounded metal filled with nitrogen gas and separated by a membrane from the mud output. When the piston pushes the mud the nitrogen gas in the dampener will be compressed storing the pressure energy; and when the piston retracts the compressed nitrogen gas in the dampener release the stored energy. So that the output pressure will be stable – no pressure fluctuation.
The dampener needs to be charged by adding nitrogen gas to certain pressure. If the nitrogen pressure is not at the right pressure, either too high or too low, the pump output pressure fluctuation will not be stabilized. This pressure fluctuation may match the MWD frequency signal and hence it disturbs decoding, it is called pump noise.
When the pump noise occurs, one may simply change the flow rate (stroke rate) so that the pump noise frequency fall outside the MWD frequency band – and then apply band pass frequency to the decoder.
The formula to calculate pump noise frequency is 3*(pump stroke rate)/60 for triplex pump and 2*(pump stroke rate)/60 for duplex pump. The rule of thumb to set up dampener pressure charge is a third (1/3) of the working standpipe pressure.
Sometime the MWD signal is not detected at all when making surface test although the MWD tool is working perfectly. This happen whenever the stand pipe pressure is the same with the pump dampener pressure. Reducing or increasing test flow rate to reduce or increase stand pipe pressure helps to overcome the problem.
When the MWD signal wave travels through mud as the transmission medium, the wave loses its energy. In other words, the wave is giving some energy to the mud.
The mud properties that are affecting MWD signal transmission is viscosity and weight. The increasing mud weight means there is more solid material or heavier material in the mud. Sometimes the mud weight increment is directly affecting mud viscosity to become higher. The MWD signal wave interacts with those materials and thus its energy is reduced on its way to surface. The more viscous the mud and the heavier the mud, the weaker the signal detected on surface.
Aerated mud often used in underbalance drilling to keep mud influx into the formation as low as possible. The gas injected into the mud acts as signal dampener as gas bubble is compressible. MWD signal suffers severely in this type of mud.
Proper planning before setting the MWD pulser gap, flow rate and pump dampener pressure based on mud properties information is the key to overcome weak signal.
The further the signal travels, the weaker the signal detected on the surface. The amount of detected signal weakness ratio compare to the original signal strength when it is created at the pulser depends on many factors, for example, mud properties, BHA component, temperature and surface equipment settings.
[0003] A kick can be defined as a well control problem in which the pressure found within the drilled formation is greater than the mud or fluid hydrostatic pressure acting on the borehole or face of the formation. This formation pressure causes fluids to flow from the formation into the well bore. In almost all drilling operations, the operator attempts to maintain a hydrostatic pressure greater than the formation pressure and thus prevent kicks. On occasion, however, and for various reasons, the formation pressure exceeds the mud pressure and a kick will occur. Kicks have become even more common due to the present trend of increasing drilling rates by using lighter drilling mud.
[0006] FLOW RATE CHANGE - An increase in the flow-out or flow rate leaving the well while pumping at a constant rate is one of the primary kick indicators. The increased flow rate is interpreted to mean that the formation is forcing formation fluids into the well bore. A decrease in the flow rate exiting from the well while pumping at a constant rate is an indicator of lost circulation.
[0007] FLOWING WELL WITH PUMPS OFF - When the rig pumps are not moving the mud, a continued flow-out from the well indicates that a kick is in progress. An exception to this indicator is when the mud in the drill pipe is considerably heavier than that in the annulus, as in the case of a slug.
[0008] PIT VOLUME CHANGE - If the volume of fluid in the pits is not changed as a result of surface controlled actions, an increase in pit volume indicates that a kick is occurring. The fluids entering the well bore as a result of the kick displace an equal volume of mud at the flow line and result in a pit gain. A decrease in pit volume under these conditions indicates lost circulation.
[0012] Presently, flow-in measurement is based on the number of strokes per minute of triplex mud pumps (see Fig. 1). The flow race obtained from the pump strokes is then corrected by a volumetric pump efficiency. This pump efficiency can fluctuate between 80% to 95% accounting for inaccuracies of plus or minus seven and one half percent in the flow-in measurement.
[0014] Using the pump strokes and the paddle measurement for flow-in and flow-out respectively, the best accuracy for the differential flow over the entire fluid flow range cannot be much better than about twenty-five percent, or three hundred (GPM) in twelve hundred GPM. This is more than ten times the required accuracy, rendering prior methods of differential flow rate measurement inadequate for desired kick detection.
[0015] Electromagnetic flow meters have also been used but have drawbacks. They do not work in oil based muds (conductivity too low). They require complete modification of the return line. In offshore rigs where modification of the return line is difficult and space is limited, there is usually no way to install them. They require expensive maintenance to sustain their accuracy.
[0019] Further, U.S. Patent No. 4,754,641 to Orban et al., while providing improved results relative to the other methods for measuring fluid flow in return lines, still suffers from inaccuracies due to the requirement of a velocity probe which is inherently inaccurate in measuring mud flow in a drilling rig return line due to the wide range of elements in the mud. Thus, even with this advance, the art does not provide a method for sufficiently accurately determining a volumetric fluid flow rate such that a kick or lost circulation determination can be made in real time on a drilling rig.
[0024] In accord with the objects of the invention, improved methods and systems are disclosed for use in a return line system of a drilling rig to aid in accurately determining a volumetric flow rate of mud in the return line without the aid of a direct velocity measurement means. The system invention broadly comprises: a non-intrusive level sensor located in or in proximity to the return line for sensing the height or level of the mud flowing in the return line and providing a signal indicative thereof; and a processor responsive to the level sensor signals for determining, in conjunction with knowledge of the return line configuration and mud parameters, the flow-out rate of the mud. Where the level sensor is acoustic, the system also includes a multiple of correction sensors for determining the temperature gradient in the return line and for investigating the presence of gas in the return line, and for providing signals indicative thereof to the processor which is responsive thereto. A more complete system also includes calibration means for calibrating the flow-out rate with the flow-in rate, and means responsive to the calibration means for determining an undesirable condition such as a kick or fluid loss. Where the system is to be used on a rig which is subject to movement (e.g. a floating rig), angle and position sensors are also employed.
[0025] In accord with other objects of the invention, the level sensor is installed in a chimney which extends from the flow line and which is in close enough proximity to the bell nipple (e.g. less than 10 feet away) such that the mud level is high and the friction between the mud which is in supercritical flow and the flow line is kept small. Where the level sensor utilized is an ultrasonic pulse echo transceiver, the correction sensors include a plurality of temperature sensors at different height locations (e.g. near the mud, at the junction of the return line and a chimney in which the transceiver is mounted, and near the transceiver), to provide information regarding the temperature gradient in the return line, as well as a calibration target which acts to sense a change in sound velocity due to the presence of gas in the return line. Data from the temperature sensors and calibration target help provide a determination of the speed of sound in the air (or air/gas) above the mud such that the echo time measured by the ultrasonic transceiver can be properly correlated to a distance between the transceiver and the mud surface. By knowing the shape and size of the return line, the slope of the return line, the height of the fluid in the return line, and a mud parameter such as the viscosity/density ratio, an accurate flow-out determination can be made without the use of a direct velocity sensor. Where the slope of the return line is changing (as determined by the angle sensor) due to movement of the rig, the flow-out results can be corrected to compensate for the motion. The flow-out determinations are calibrated against the flow-in measurements which are made by detecting mud pump strokes (the positive displacement per pump stroke being known).
[0027] FIG. 1 is a schematic view of a drilling fluid or "mud" circulation system for a floating or fixed drilling rig where a flow measuring system embodying the invention may be used;
[0035] FIGS. 7a and 7b are logs of the flow-in of mud-displacing cement into a well-bore as measured from a cement truck, and the volumetric flow-out therefrom as measured by the system of the invention, respectively.
[0037] Referring to Fig. 1, a floating or fixed drilling rig mud circulation system is schematically illustrated, and it will be appreciated that the invention may be used with a bottom supported offshore drilling rig or a land drilling rig, as well as with a floating rig. As discussed above, flow rate into the well may be derived by counting the strokes per minute of mud pumps 16 or by direct measurement with a flow meter. After the "mud" or drilling fluid travels down the drill string 18, it moves up the annulus 20 between the casing 22 and the drill string 18 to the bell nipple 24. A return line 26 communicates with the bell nipple 24, as best shown in Figs. 1 and 2a, to return the mud to the mud pits 28. The flow-out measuring sensor system S according to the invention is disposed in the return line 26 in relative close proximity to the bell nipple 24; preferably within ten feet thereof.
[0038] The sensor system S in cooperation with a computer 14, which by way of example only includes a disk memory 28, a RAM memory 30, a CPU 32, and a ROM memory 34 (see Fig. 2a), is provided to accurately measure in real time the flow Q through return line 26. The volumetric flow Q is simply the product of the cross-sectional area A of fluid flowing at a given location in the line and the average velocity of the fluid moving at that location. However, because a determination of velocity is not made with a velocity probe, as most velocity probes are either intrusive or cannot handle the wide range of mud rheology, cuttings, gas, etc., the determination is made in the following manner,
[0039] In a simple return line geometry such as that seen in Fig. 2a, the velocity of mud in the annulus 20 is typically between one-half and one ft/sec, whereas the velocity of the mud in the return line 26 is typically between five and ten ft/sec. The acceleration of the mud is due to gravity and the slope of the return line, with the slope being great enough (e.g. typically greater than .5 degrees) to overcome the retarding effects of friction between the fluid and the pipe wall. In fact, most return lines have a slope of between two and twenty degrees. Under these conditions, a "critical flow" is established in the bell nipple, with the mud having a depth Hc and velocity Vc as seen in Fig. 2b. As the flow accelerates down the return line, the mud is in supercritical flow, and the velocity increases and the mud depth decreases, as is seen in Fig. 2b. This condition continues until the friction loss increases enough to offset the gravitational forces causing the acceleration. However, most return lines are too short for this equilibrium to be reached.
[0040] The inventors have found that in a typical return line with mud in supercritical flow, an increase of flow typically translates into an increase in mud depth (level) according to a substantially linear relationship for flow rates above about two hundred gallons per minute (200 GPM). Put another way, and as seen in Fig. 4 which shows the relationship between flow rate, mud level, and velocity in a return line, mud velocity is almost constant above 200 GPM, and an increase in flow rate directly translates into an increase in mud depth. Thus, for any given return line configuration with typical flow rates, the measured height of the mud in the return line may be calibrated to a flow race with reasonable accuracy. By way of example, the measurements indicated in Figure 4, which relate level to flow, were made three feet from the bell nipple in a return line of twelve inch diameter and five degree slope, and a mud with a density of twelve PPG and viscosity of ten cp. For return lines of different diameter or slope, mud of a different viscosity/density ratio, and a measurement location of different distance from the bell nipple, the curves of Figure 4 would assume different values.
[0041] As stated above, a review of Fig. 4 indicates that the GPM flow-out can be determined directly from the mud level without a determination of velocity. Thus, for the stated return line geometry and mud properties, a measured mud depth (or level) of 2.4 inches is equivalent to a mud flow-out of 300 GPM, while a measured mud depth of 4.8 inches is equivalent to a mud flow-out of 900 GPM. With a slope of 2.4"/600 GPM, in order to achieve a desired accuracy of the order of 25 GPM, a measurement of mud depth must be accurate to at least 0.1 inch.
[0042] Given the fact that flow rate can be measured directly from mud level if the return line geometry and mud makeup are known, means and methods for making the level measurement must be set forth. One preferred means for accomplishing the mud level measurement is seen in Fig. 2a where a sensor system mounts on the return line 26 and sits in an eight inch diameter hole cut into the return line. Sensor system S includes a chimney section 40 of six inch diameter in which the mud level sensor is mounted, and an inflatable seal 41 which fits around the chimney and inside pipe flanges 43 welded to the cut in the return line 26. For mechanical stability and alignment purposes, a support 45 is provided around chimney 40. Turnbuckles 46 connect the support to clamp 48 which grips the return line 26. This permits alignment of the sensor system S relative to the return line such that the sonic beam produced by a transceiver 50 (as discussed below) is substantially normal to the mud. In this arrangement, sonic beam reflections can be received and sensed by the transceiver 50.
[0044] The sensor system S includes a mud depth or level sensor for measuring the distance between the sensor and the mud surface. The sensor preferably includes an ultrasonic transmitter-receiver ("transceiver") 50 which both transmits and detects ultrasonic waves. Because a transceiver cannot detect a wave immediately after it has transmitted one (i.e. the transceiver has "dead time"), the transceiver 50 is preferably mounted in a housing or chimney 40 which removes the transceiver from the mud surface and causes the return signal to be received after the dead time. Mounting the transceiver 50 in the chimney 40 also protects it from mud splashing. Even so, a water sprayer 79 which receives water from water source 58 is preferably provided to clean the transceiver 50 and the other sensors located in or about chimney 40.
[0045] To convert the echo return time into a distance requires knowledge of the velocity of sound in the medium through which the sound pulse travels, as distance is equal to the product of time and velocity. Parameters affecting the velocity of sound include the temperature and the composition of the medium through which the sound travels. As the composition and the temperature of the "air" above the mud in the return line can change over time, additional sensors are utilized to monitor these parameters. For temperature, preferably three sensors 29a, 29b, and 29c are utilized to measure the heat gradient present between the mud surface and the transceiver 50. Thus, the first sensor 29a is placed on adjustable pole 52 and located near the mud. A second sensor 29b is located at the junction of the return line 26 and the chimney 40, while the third sensor 29c is located close to the transceiver 50. The sensors used are preferably AD590 solid state devices available from Analog Devices which produce exactly 1 microamp per degree Kelvin and are accurate enough to be calibrated electrically.
[0046] A manner for compensating the determined echo time for temperature gradients and changes therein is found in U.S. Patent #4,754,641 and will not be further discussed herein. It should suffice to note that all temperature determinations are fed via signal conditioners 57 and A/D converter 59 to the computer or processor means 14 which utilizes the temperature and echo time information in providing a distance, and hence a return line mud height determination. It should also be noted that similar techniques can be used with fewer or greater numbers of temperature sensors to provide more or less accuracy, and it is not the intent hereof to be limited to exactly three temperature sensors.
[0047] In taking into account the composition of the medium through which the sound is travelling, it is not necessary to determine the actual composition. Rather, it is only necessary to have a reference from which relative changes can be calculated. In particular, the provision of a reference target 51 on adjustable pole 52 at a known distance from the transceiver 50 permits a determination of the time it takes for the ultrasonic waves to travel a fixed distance at the temperatures provided by the temperature sensors 29a and 29b in whatever medium is present (e.g. air, gas, or air/gas mixture). Thus, by first sensing the reference echo time from transceiver 50 to target 51 and back to transceiver 50, and then sensing the echo time from transceiver 50 to the mud surface and back to the transceiver 50, the reference echo time can be used in conjunction with the temperature information to determine the distance between the transceiver 50 and the mud surface in an extremely accurate manner.
where Vs is the sonic velocity, Ta, Tm, and Tt are respectively the absolute temperature, the mean temperature of the mud path and the mean temperature of the target path, K is the effect of the gas composition on the sonic velocity, Lm is the distance from the transceiver 50 to the mud surface in the return line, Lt is the distance from the transceiver to the target, and △Tm and △Tt are the mud echo and target echo times respectively.
which indicates that with the reference target, the distance to the mud surface is derived from measurable (△Tm, △Tt, Tm, Tt) or known (Lt) parameters and is not dependent on the composition effect K of the gas. It should be noted that Tm and Tt as provided represent the mean of the gradient over distances Lm and Lt respectively, and that more complex representations more specifically accounting for temperature gradients would suggest themselves to those skilled in the arts.
[0050] Although knowing the actual composition of the medium through which the sound pulses travel is not necessary in practicing the present invention, it has been found that the method and apparatus of the present invention can be used effectively to detect the presence of methane gas (CH₄) in the mud return line and to calculate an approximate volumetric fraction of methane. Specifically, since the speed of sound in "air" (nitrogen/oxygen mixture) is approximately 332 m/sec at 0°C while the speed of sound in methane is approximately 430 m/sec., a large change in the speed of sound measurement derived from the target signal may properly be interpreted to indicate the introduction of methane into the return line since methane is by far the most abundant gas encountered during a drilling operation.
[0053] In order to obtain both target and mud echo information, the target 51 should be located in the return line such that the echoes received from the target do not interfere with the echoes received from the mud surface. In return lines of different diameters, the location might need to be different to avoid the second echo of the target. The placement of the target 51 on the adjustable pole 52 permits such adjustment and ensures that the target can be located at a location of more than half the distance from the transceiver to the mud surface. Alternatively, if desired, the sensing of the target and mud echoes can be time multiplexed. Also, if desired, automatic adjustment of transceiver transmission frequency in order to obtain the largest echo signals available can be provided by having microprocessor 61 which controls sensor 50 conduct a search for the best frequency.
[0054] Once the distance between the transceiver 50 and the mud surface (and the distance between the transceiver and the pipe or sediment surface of an "empty" pipe which may be determined by using the sensor system or through a knowledge of the pipe diameter etc.) is determined by the computer 14, a direct determination of flow rate may be obtained from a look-up table representing the mud height to flow rate relationship for the particular return line and mud parameters. Such a look-up table is generated either by accumulating experimental data or according to the following theoretical analysis.
[0055] Flow rate (Q) may be defined as the mathematical product of fluid velocity (V) and the cross-sectional flow area of the mud (A); i.e. Q = VA. The cross-sectional flow area of the mud is simply a function of the mud level and the geometry of return line. Complicating factors such as the presence of sediment 87 (as seen in Fig. 3) may also be taken into account, such as discussed in U.S. Patent #4,754,641. The sediment level may be determined in the absence of flowing mud. It is assumed that the sediment is simply stationary material which is taking up some of the cross-sectional area of the return line. While the resulting geometry of the fluid flow is not a simple one, it is nevertheless within the knowledge of those skilled in the art to solve for the cross-sectional flow area.
[0056] A determination of average fluid velocity (V) is not as straight-forward as the determination of cross-sectional area, particularly because the determination is not a direct one (i.e. no velocity sensors are used). With a simple return line geometry and no friction, the velocity of the mud would be a direct result of the vertical fall of the liquid surface; the energy of which would be converted from potential to kinetic energy. In particular, such a system could be described according to the following relationships:
where Vc is the critical velocity, g is the acceleration due to gravity, Ac is the critical cross-sectional area of the mud in the return line close to the junction of the return line with the bell nipple (i.e. the critical area), and b is the surface width of the fluid. For a given mud flow rate Q and geometry which relates Ac and b, the critical velocity Vc, the critical area Ac, and the critical depth hc become known. As a result, tables can be generated which relate various flow rates Q and resulting values of Vc, Ac and hc.
[0058] While relationships (5) - (10) assume the absence of friction up to the critical point, it will be appreciated that friction does play a role in the velocity of the mud in the return line, and accounting for friction is necessary. The following conservation of energy equation makes such an account:
[0059] With the provided continuity (6) and critical flow (10) equations and with the provided energy equation (11), the velocity V at the location of the level sensor can be determined as long as the friction factor f can be found. The friction factor f can be determined according to the Reynold"s number Re pursuant to well known equations. The Reynold"s number, in turn, is dependent on the velocity, hydraulic diameter, density and viscosity of the flowing fluid according to Re = VDρ/µ. The density and viscosity are typically monitored on the job site and are available. Account, however, should be taken if the viscosity or density changes significantly over time. By keeping the location of the level sensor near the bell nipple, a crude estimate of friction is sufficient, as the inventors have determined that within approximately ten feet of the bell nipple, the friction losses of the returning fluid are small and that a crude estimate yields reasonable results. In fact, Re and f are considered to be constant and equal to their critical values throughout the length of the return line (although the critical values may change over time if the flow or mud parameters change). This is a reasonable approximation for as the velocity increases, the depth decreases, tending to keep Re constant. A typical friction loss of about twenty percent yields a velocity reduction of about ten percent, and an error of ten percent in analyzing the friction losses would result in a tolerable change of velocity of only one percent. Regardless of how the friction loss determination is originally estimated, calibration of flow-out corrects for any inaccuracies as is hereinafter described. In sum, then, equations (5) - (11) are solved at the outset of a job for the fixed values of the pipe size D, distance between the sensor system S and the bell nipple L, return line slope ϑ, mud viscosity µ, and mud density ρ, to establish the height (h) to flow (Q) look-up table appropriate for the job.
[0060] Turning to Figure 5, the method for determining the flow rate in the return line, which utilizes calibration is seen. At 100 the echo times for the reference target and for the mud surface are measured, along with the temperature gradient in the return line and chimney as measured by the temperature sensors. Also, as will be discussed hereinafter, the flow into the well is measured. In a preferred embodiment, the angle of the return line, and the density and viscosity of the mud are further measured. At 104, the echo times and temperature gradient are used to find the fluid flow height H. Also, at 104 the mud viscosity and density are used in conjunction with parameters stored at 200 such as the return line geometry (e.g. diameter), the horizontal distance from the bell nipple to the measurement location (L), the return line slope (ϑ), the gravitational constant (g), and any other relevant parameters which are constant for the given system, to provide a determination of the velocity of the mud in the return line at the measurement location in accord with equations (4) through (11) above. From the fluid flow height, the cross-sectional area of the mud in the return line at the measurement location is determined at 104. If available, additional information such as sediment level (box 107) may be provided to the processor which determines at 104 the cross-sectional area of the mud.
[0061] At 110, a determination of the flow-out (Q) of the mud from the wellbore is obtained from a transform (i.e. look-up table such as is represented by Fig. 4 for the provided return line and mud parameters) which relates the flow height to flow-out. Alternatively, the flow-out (Q) is found as the product of the determined cross-sectional area (A) of the mud and the mud velocity (V) at the measurement location. The flow-out (Q) determination at 110, however, is preferably viewed as a theoretical flow-out, such that through a calibration, an absolute flow-out determination (which is only absolute relative to the accuracy of the flow-in pump measurements) can be made. Thus, at start-up a single or multi-point calibration lasting only several minutes is preferably performed, and provides a calibration between the actual flow-out and the "estimated" theoretical flow out. The calibration accounts for non-linearity, errors in estimating friction, and other systematic errors which may be present such as changes in geometry, mud properties, sensor calibration, etc. Then, during drilling, when the theoretical flow-out determination is made at 110, the flow-out determination is corrected at 112 by the calibration constant calculated at start up.
[0062] The corrected flow-out determination is subjected to a trend analysis where the flow-out determination of 112 is compared at 118 continuously to the flow-in measurement measured by the positive displacement mud pump strokes at step 100 to determine whether there is any difference between the two. Where there is a difference, that difference is monitored at 119 over time to determine whether the difference is relatively constant over time. If the difference is relatively constant (i.e. steady or slowly changing) it is assumed that the flow-in or flow-out calibration has drifted and an average calibration coefficient (over a period of about an hour) is determined at 120 and fed back to the calibration correction step 112; i.e. autocalibration. If the difference between flow-out and flow-in (ΔQ) is not relatively constant, a determination is made at 122 as to whether the rate of change is greater than or equal to 10 GPM/Min over a four minute time scan. If the rate of change is less than 10GPM/Min (as seen in Fig. 6a) noise or measurement drift is assumed, and the situation is accommodated via autocalibration. If the rate of change is greater than 10 GPM/Min a warning is given, and if it lasts for four minutes, as seen in Fig. 6b, an alarm is sounded by gauge 62 (of Fig. 2) and an influx (kick) or an outflux (fluid loss) situation is declared at 125. Regardless, the flow-out, and delta flow determinations are preferably recorded at recorder 60 (of Fig. 2) in a log format over time.
[0064] Testing the system and method inventions during a cementing operation where the flow-in was carefully measured independently by the cement truck pumps (not by the rig mud pumps), it was determined that the system and method inventions provide an excellent determination of flow-out. As seen in Figs. 7a and 7b, during a period of slightly over an hour, the measured flow-out (Fig. 7b) tracked the known flow-in (Fig. 7a) accurately. In fact, the total volume of cement and mud that was used during the hour as measured by the cement truck was two hundred seven barrels, while the measured (via integration) displaced out-flow was two hundred one barrels; a very acceptable difference of only three percent.
[0065] There have been described and illustrated herein systems and methods for measuring the volumetric flow of a fluid in a return line. While particular embodiments have been illustrated and described, it is not an intention that the invention be limited thereto, as it is intended that the invention be as broad in scope as the art will allow. For example, while a system was described as having three temperature sensors, and a reference target for "sensing" a change in medium above the mud, it will be appreciated by those skilled in the art that the sensors and reference target are employed for compensating the transceiver echo time for a changed speed of sound, and that other correction means could be utilized. Also, while the system was described as using an ultrasonic transceiver, equivalents of the same, including separate transmitters and receivers, could easily be utilized. In fact, if desired, the ultrasonic transceiver as well as the temperature sensors and reference target may all be replaced by an optic or radar system which could accurately sense the height of the mud in the return line. Further, while the sensor system is preferably located within ten feet of the bell nipple in order to minimize the effect of friction, it will be appreciated that it is still possible to locate the sensor system beyond that distance if account is taken of friction in accord with the technical discussion provided herein with reference to Reynold"s numbers etc., or if account is taken of friction through calibration. Therefore, it will be apparent to those skilled in the art that yet other changes and modifications may be made to the invention as described without departing from the scope and spirit of the invention as so claimed.

With advancements in offshore oil drilling, deepwater drilling technology has been developing consistently, which has promoted the development of conductor jetting, dynamic killing, well logging while-drilling and pressure while-drilling techniques [1]. However, the exploration and development of deepwater resources still suffer from many challenges, which mainly span following three aspects [3–8]. First, if a riser is adopted during operation, riser length must grow with increasing water depth, yielding a heavy and cumbersome structure, especially for the upper riser, which must bear a larger tension. Second, difficulties arise during advancing in the horizontal section; when drilling in the horizontal section, it is difficult for the drilling fluid to carry the rocks. Moreover, the borehole friction increases rapidly, resulting in extra weight constraints. Third, owing to the narrow pore-fraction pressure window, a precise control of wellbore pressure is required for formations with severe leakage, reservoir pressure failure, and high sulfur content. Therefore, focusing on a series of challenges in deepwater drilling, a subsea closed-cycle riserless drilling method with pump + gas combined lift is proposed in this study, providing the theoretical foundation and design basis for efficient, economical, and safe subsea drilling applications.
In this work, the advantages of closed-cycle riserless drilling method using a pump + gas combined lift are analyzed and its multiphase flow drilling model is proposed. By solving the model, the influence of drilling fluid displacement, gas injection displacement, gas injection site and seawater depth on drilling hydraulic parameters can be obtained. The optimization hydraulic parameters design method of closed-cycle riserless drilling method with a subsea pump + gas combined lift is proposed.
In 2001, a Norwegian company called AGR developed a riserless mud recovery (RMR) drilling technology based on its cutting transportation system (CTS). The principle of this technology is to pump mud subsea to the drilling platform by leveraging the mud suction module at the wellhead, subsea mud lifting pump, as well as mud return pipeline, thereby forming a closed-cycle of drilling fluid. The practice costs and risks are significantly lower than that of methods using risers [9]. First, RMR was merely adopted for shoal-water oil-and-gas exploitation, which is mainly targeted to solve the drilling challenges concerning complex subsea conditions and shallow risks and ensures a smooth borehole drilling operation on the surface layer. In 2003, the first commercial RMR application was performed in the Caspian Sea. As the technology developed, the closed-cycle riserless drilling system has been advancing from shallow sea to deep sea applications. The issues restricting the application of deepwater closed-cycle drilling methods with risers mainly stem from the lifting capacity of mud lifting pump and strength of mud return pipeline. Therefore, AGR, together with Shell, BP America, and DEMO2000, formed an industrial project team to develop the so-called deepwater RMR system, and successfully conducted a field test in the South China Sea (Malaysia) at a depth of 1,419 m in September 2008. The test has proved the feasibility of this technology in deepwater drilling applications and its advantages for drilling in the South China Sea, such as safe drilling in strata with shallow risk, overcoming the mud logging restrictions, extending the setting depth of surface casing, etc. In 2008, the RMR drilling system has been adopted for a drilling operation with self-elevating platform for the first time, which achieved favorable results. The deepwater RMR system is illustrated in Figure 1.
Compared with the conventional riserless mud lifting systems, this system has introduced an innovative gas lifting process by adopting a gas + pump combined lifting scheme. This design can effectively decrease the subsea pump working power, enhance the lifting head, reduce the cost and difficulty of construction, improve the reliability of lifting systems, and enable the application of closed-cycle riserless drilling in offshore applications with higher depth. The gas + pump combined lifting system is illustrated in Figure 2.
Major advantages of this novel subsea closed-cycle riserless drilling method with a subsea pump + gas combined lift in deepwater drilling are as follows:
(1) Riserless drilling: Conventional offshore drilling adopts risers to isolate seawater inside the drilling fluid system. The dual-channel drill pipeline exposed to seawater replaces the cumbersome riser system and its components, thereby reducing the amount of drilling fluid and number of drilling pumps required, as well as the bearing capacity and space requirements for drilling rig deck. Moreover, it can reduce the quantity of casing, optimize the structure along well depth, and obtain a wellbore with a single diameter.
(2) Closed-cycle system: When a subsea pump + gas combined lift is used, drilling fluid is pumped to the well bottom through the inner pipe of the drilling pipeline; then, it impacts the rock stratum via jet from the drill bit. The fluid, carrying rock debris cut by the drilling bit, is then lifted to the subsea mud pipeline along the annular channel formed between the wellbore and drilling pipe. Exploiting the drilling fluid return pipeline, rock debris are carried to the drilling platform via the subsea pump + gas combined lift. Closed-cycle serves as the basis for the implementation of deepwater drilling technology with pressure control. Via precise control of bottom hole pressure and drilling fluid flow, this technique can address the narrow safety density window issue in deepwater drilling, while reducing down-time and well control risks.
(3) High cutting carrying efficiency: In conventional offshore drilling applications, the drilling fluid is pumped in via drill pipe and returned through the borehole annulus and riser annulus after carrying the cuttings. By leveraging the subsea pump + gas combined lift, carried drilling fluid cuttings return to the wellhead via the drilling fluid return pipeline. The drilling fluid is not required to be transported at high velocities for carrying cuttings to the wellhead, which reduces the scouring of the borehole wall, which is greatly applicable to wells with large displacement and horizontal wells.
(4) Enlarging the working water depth of third- and fourth-generation drilling rigs: deepwater and ultra-deepwater operations mandate significant load-bearing requirements on drilling rigs and deck space. Hence, for conventional offshore drilling, fifth-, sixth- or seventh-generation drilling rigs are required. The novel closed-cycle riserless drilling method using a subsea pump + gas lift alleviates the load-bearing capacity and space requirements on the drilling rig deck. Consequently, third- and fourth-generation drilling rigs can be adopted for such drilling operations, which reduces the daily running costs of drilling rigs and increases their working water depth.
This technology aims to optimize the hydraulic parameters in deepwater drilling. The hydraulic parameter accuracy directly affects the safety and efficiency of drilling. Significant discrepancies exist between the novel closed-cycle riserless drilling with a subsea pump + gas combined lift and conventional deepwater drilling applications, which are mainly observed in the calculation of gas-liquid-solid three-phase flow in the upper return pipeline, wellbore pressure, and cutting carrying efficiency when subsea pump is online. The wellbore multiphase flow model states the fundamental theory for calculating the hydraulic parameters of the novel closed-cycle riserless drilling with a subsea pump + gas combined lift.
The foremost multiphase flow simulation of the well kick adopts homogeneous flow models. Leblanc and Leuis (1968) established the first multiphase flow model of a well kick suitable for gas overflow [10]. This model assumes that the overflowing gas exists as a continuous column inside the wellbore; then, performs simple calculations regarding the pressure change in the annulus during overflow without considering the mutual slippage between gas and liquid phases. Similarly, based on the concept of homogeneous flow, Horberock and Stanbery (1981) calculated the average value of gas-liquid characteristic parameters [11]; then, they established the continuity and momentum conservation equations of the homogeneous fluid in vertical pipeline. Subsequently, they simulated the pressure change in the wellbore. Santos (1982) established a relatively comprehensive multiphase flow model of deepwater kick by assuming a bubbly status in the wellbore during overflow [12]. In their model, they introduced the void fraction concept, as well as the effects of gas-liquid slippage and friction pressure losses in two-phase flows. Nickens (1987) considered the velocity slippage between different phases as well as the friction pressure loss of single and multiple flows. By numerically solving the dynamic equations of mass conservation for gas and liquid phases simultaneously, a comprehensive multiphase flow model in the wellbore has been established [13]. However, many factors, such as temperature variation, gas dissolution, etc., were not considered in this model. Adopting the established model, the effects of wellbore shape and hydraulic parameters of drilling assembly on the borehole pressure distribution were investigated. Moreover, many scholars, such as White and Walton (1990), Van Slyke and Huang (1990), Szczepanski et al. (1998), Nunes et al. (2002), and Velmurugan et al. (2016), applied the classic model of gas-liquid two-phase flow during well kick to analyze the multiphase flow pattern in the wellbore under different working conditions, namely, varying mud types [14, 15], overflowing gas composition, and deepwater drilling [16–18]. Sun et al. (2017, 2022) integrated the hydrate phase balance equilibrium and phase transition rate models with the multiphase flow model of deepwater well kick [19, 20]. Based on their analysis, they discovered that during well kick, the phase transition of hydrate would lead to concealment in the early stage and burstiness in the later stage. Fu et al. (2020, 2022) revealed that the hydrate formation makes drilling fluid exhibit the shear-thinning at low shear rate condition and the shear-thickening at high shear rate condition. The corresponding rheological model of drilling fluid is developed incorporating hydrate concentration, shear rate and additive concentration, which has an important contribution to improvement of the multiphase flow [21–23].
Because the novel closed-cycle riserless drilling method with a subsea pump + gas combined lift is still in its initial stage globally, current research on the multiphase flow pattern in wellbore is mainly based on the working conditions of deepwater drilling applications with risers. The multiphase flow patterns in wellbore that are affected by multiple factors, such as subsea pump and gas injection, are rarely reported. Hence, the existing theoretical model is difficult to apply in most cases.
When using the novel deepwater closed-cycle riserless drilling with a subsea pump + gas combined lift, gas lifting module enters wellbore through the mud return pipeline and changes the flow patterns of drilling fluid from liquid-solid two-phase flow to complex three-phase flow comprising gas, liquid, and solid. The selection process of pump + gas combined lifting parameters is constrained by various restrictions, such as borehole cleanliness, mud pump capacity, formation stability, rated power of lifting pump, etc. The following requirements should be fulfilled:
The drilling fluid return pipeline is divided into two sections, namely, sections a and b. Along the drilling fluid return pipeline, the section from the subsea lifting pump to the intersection of gas injection pipeline and drilling fluid return pipeline is named section a of the return pipeline (as shown in Figure 2). Accordingly, the section from subsea lifting pump to the intersection of the gas injection pipeline and drilling fluid return pipeline to the drilling ship is named section b of return pipeline. The multiphase flow equations of sections a and b are established. No gas phase exists in section a of drilling fluid return pipeline. By considering only the liquid and cutting phases, the multiphase flow equations in section a of drilling fluid return pipeline are stated as follows:
The temperature and pressure of drilling fluid inside the return pipeline on sea surface are measured using thermometer and pressure gauges at the wellhead. The displacement of drilling fluid is calculated based on the mud pump readings. The air injection displacement is measured according to the gas flowmeter, and the cutting displacement is calculated based on the mechanical drilling speed.
where I and j are the time and space nodes, respectively, and Δs and Δt are the space and time steps, respectively. Basic parameters obtained in step 1 are substituted into the discrete formula to calculate the gas injection displacement of current step, qg, as well as the pressure, gas velocity, drilling fluid return velocity, cutting return velocity, and cutting concentration distribution along the drilling fluid return pipeline at a depth of h1 for the gas injection pipeline.
With the same pumping parameters, the drilling fluid displacement varies from 5 L/s to 40 L/s with 5 L/s increments. The multiphase flow model for the closed-cycle riserless drilling is used during the analysis, and the influence of subsea pump displacement on the multiphase flow in the return pipeline is examined, as demonstrated in Figure 3. The simulation results indicate that in the section mudline, the pressure along depth inside the return pipeline increases with increasing drilling fluid displacement values; moreover, in the section below mudline, the pressure along depth inside the return pipeline decreases with increasing drilling fluid displacement. This is because the subsea pump is located at the mudline level. In the section above the mudline, increasing the liquid phase displacement will result in higher subsea pump discharge pressure and larger fluid kinetic energy in the pipeline. Hence, the pressure inside the pipe increases. In the section below mudline, as the fluid in the pipeline is not affected by the subsea pump, the well bottom pressure decreases with an increasing drilling fluid displacement, decreasing the pressure inside the pipeline.
As illustrated in Figure 4, the variation in drilling fluid displacement affects the cutting distribution inside the return pipeline. Higher displacement yields smaller volume fraction of cuttings in the pipeline. Affected by the gas injection in the pipeline at 400 m, the volume fraction of cuttings gradually decreases along the return pipeline and eventually becomes consistent. Gas injection will enhance the turbulence intensity of the fluid in the pipeline, which increases the fluid flow velocity and decreases the sectional volume fraction of cuttings. Therefore, migrating cuttings to the wellhead becomes easier.
Effect of drilling fluid displacement on gas volume fraction inside the return pipeline is calculated and demonstrated in Figure 5. As the gas migrates from the gas injection point at a depth of 400 m, the gas volume fraction decreases with increasing drilling



 8613371530291
8613371530291