
mud pump hydraulic power free sample
The shaft power - the power required transferred from the motor to the shaft of the pump - depends on the efficiency of the pump and can be calculated as Ps(kW) = Ph(kW)/ η (3)

The 2,200-hp mud pump for offshore applications is a single-acting reciprocating triplex mud pump designed for high fluid flow rates, even at low operating speeds, and with a long stroke design. These features reduce the number of load reversals in critical components and increase the life of fluid end parts.
The pump’s critical components are strategically placed to make maintenance and inspection far easier and safer. The two-piece, quick-release piston rod lets you remove the piston without disturbing the liner, minimizing downtime when you’re replacing fluid parts.

This invention relates generally to piston pumps for the water well drilling industry, and more particularly to a hydraulic cylinder powered double acting duplex piston pump.
Double acting duplex piston pumps are well known and have been used in the water well drilling industry for many years. Typically they employ a crankshaft and flywheel driven in various ways, a reciprocating engine or a hydraulic motor being examples. Typically, they are heavy units with a large component of cast iron. Today"s well drilling trucks carry lengths of drilling pipe, as well as derricks, motors, pumps of various kinds, and the “mud” pump. The current double acting duplex piston pumps with crankshaft and flywheel, being very heavy, contribute significantly to the weight and space requirements of the truck. They impact the ability of a truck to meet federal highway weight restrictions. Also, the mechanical crank throw design imparts a variable speed to the mud pump piston. In such designs, the piston is either accelerating or decelerating during a large part of its design stroke. So the piston operates at its full design capacity during only a portion of the stroke. Therefore, it is an object of the present invention to provide a duplex piston pump useful as a mud pump on a water well drilling machine, but without a motor, crankshaft, flywheel, gearing, and/or belts, for a significant weight reduction.
Described briefly, according one embodiment of the present invention, a mud pump is provided with two working cylinders for pumping mud, and two sets of double-acting hydraulic driving cylinders. One set of two driving cylinders has the piston of each connected to the piston of one double-acting mud pump cylinder. The other set of two driving cylinders has the piston of each connected to the piston of the other double-acting mud pump cylinder. The connection of a set of driving cylinder pistons to the mud pump piston is through a member which allows side-by-side, or over and under parallel arrangement of the driving cylinders and mud pump cylinders, so the overall length is minimal. An electro-hydraulic control system is provided to coordinate the action of the pump driving cylinders with the mud pumping cylinders for contributing to steady flow of mud from the mud pump.
FIG. 2 is a schematic elevational view of one of the two pump assemblies of the duplex piston pump according to one embodiment of the present invention.
FIG. 3 is a schematic diagram of a system according to the illustrated embodiment and showing both of the duplex mud pump cylinders, with one of two hydraulic driving cylinders for each of the mud pump cylinders, and including an organization of hydraulic flow divider, rod position sensing, proximity-type electrical switches and associated electrical relays for solenoid-operated hydraulic fluid directing spool valves associated with the hydraulic cylinders.
FIG. 6 is an example of a flow chart relating mud pump speed to mud pump output volume capacity and hydraulic driving oil volume requirement for a pump according to the illustrated embodiment of the present invention.
FIG. 7 is a diagram showing theoretical pump driving cylinder piston performance of the two sets of mud pump driving cylinders operating according to the illustrated embodiment of the present invention.
FIG. 1 shows, schematically, a normal environment in which the mud is pumped by duplex piston pump 5 of the present invention from the chip separation tank 6 through the pump and the discharge the line 7 into the top of drill pipe 8 and down in the drill pipe and out into the well casing at the drill bit 10. The mud flows upward through the casing and back into the separation tank 6. The pump itself includes two mud pumping cylinders 1 and 2 fixed relative to a base 3 (FIGS. 5A and 5B) by mounting to four housings 4L, 4F, 4R and 4B which are fixed to the base.
As suggested above, according to the present invention, an all-hydraulic drive for the two mud-pumping pistons in cylinders 1 and 2 is achieved. For that purpose, and referring to FIG. 3, a variable volume hydraulic pump P is used. It can be set, for example, at a rate of 36 gallons per minute at 1,000 psi. A motor M can be used to drive such a pump, and such pumps and drives for them are known in the art and readily available. The pump output is fed to a flow divider D. This is not merely a device to split the flow. Instead, it has a piston inside which will shift in either direction to the extent necessary as it tries to be sure that the exact same volume flow rate is delivered at both output ports of the flow divider. An example of such a flow divider is Model MH2FA by Rexroth Worldwide Hydraulics.
Before proceeding further with this description, it is important to understand that each half of the duplex piston pump includes a double-acting mud pump cylinder and piston assembly. FIG. 2 shows one of the halves including mud pump cylinder 1. The other half, including a mud pump cylinder and associated hydraulic driving cylinders is identical. FIG. 5A shows, schematically, a rod end view of the duplex piston mud pump 5 including the mud pump cylinders 1 and 2 and associated driving cylinders of both halves.
The mud pump cylinders and their associated driving cylinders may be fixed relative to each other and mounted to the base 3 by any suitable means. The schematics of FIGS. 5A and 5B show, as an example, the four valve housings 4F, 4L,4B and 4R fixed to base 3. Except for right and left ports, each of these housings is the same as the others, and includes therein a chamber such as 41C having an opening 41A communicating with a port of a mud pump cylinder such as cylinder 1 or 2. Each chamber 41C also has two other openings. One of them is fitted with a one-way, spring loaded outlet valve such as 16 to enable mud to move from chamber 41C into the upper end of housing 4L and out through port 41D into the discharge plenum 7A. The other opening 41E of chamber 41C is fitted with a spring loaded inlet valve such as 14 communicating with the lower end of housing 4L and enabling mud entering suction inlet 6A of the mud suction manifold 6B to enter through port 41E in housing wall and into chamber 41C. The mud pump cylinders are attached to their respective valve housings in conventional manner with the ports of the cylinders communicating with the respective chambers of the housings.
Referring now to FIGS. 2 and 5A and 5B together, FIG. 2 shows schematically mud pump cylinder 1 and inlet and outlet valves 11 and 12, respectively, associated with the pump port at one end of cylinder 1, and inlet and outlet valves 14 and 16, respectively, associated with the pump port at the opposite end of cylinder 1, the rod-end of the cylinder. In practice since there would normally be only one port at each end of the cylinder, the valves would be in the housings 4L and 4F for cylinder 1. There is a packing gland 17 at the rod-end of the cylinder. In FIG. 5B the top of housing 4L is cut away to show discharge valve 16. Suction or inlet valve 14 below chamber 41C is shown larger in dashed lines to be able to see it in FIG. 5B, as it is the bottom of chamber 41C, FIG. 5A.
According to one feature of this invention, there are two hydraulic driving cylinder/piston assemblies 19 and 21 arranged in a way to drive the mud pump piston 1P in cylinder 1. As suggested above, cylinders 1, 19, and 21 are all connected relative to each other by some suitable means (brackets and/or clamps, for example) so that they are longitudinally immovable relative to one another. This is represented schematically for both sets of mud pump and driving cylinders at the valve housing 4L, 4R and associated inlet and outlet and base in FIGS. 5A and 5B, to which all of the six cylinders of both halves of the duplex pump are rigidly, but removably connected. Each of the two driving cylinder assemblies for piston 1P has a piston rod such as 19R and 21R bolted to a rod connector plate 22. Each rod may extend through the piston and exit the driving cylinder at the end opposite the plate-connected rod end, as indicated at 19S and 21S. The respective pistons 19P and 21P are affixed and sealed to the rod in a suitable way and may be of any suitable construction. Of course, the same effect may be achieved using separate colinear rods secured to opposite faces of the pistons. The piston rods 19R and 21R of the driving cylinders for mud pump cylinder 1, and rod 1R of the mud pump cylinder 1 itself, are bolted to the rod connector plate 22. Each of the rods 19R, 19S and 21R, 21S is supported at opposite ends of the respective cylinder by bearings and seals at 19B and 21B, respectively. Using double rod cylinders provides equal working area on the two sides of the piston, enabling equal oil flow and thrust capacity in both directions of piston travel. One or the other of the driving cylinder rods for mud pump cylinder 1 is associated with a set of proximity sensing switches A-1, B-1, C-1, and D-1 to operate a relay to shift a hydraulic solenoid valve spool to control hydraulic fluid to and from the set of two driving cylinders 19 and 21 to drive the mud pump 1. The same kind of arrangement is provided for mud pump cylinder 2. For each set, the driving cylinder which has the associated proximity switches, may be referred to hereinafter from time-to-time, as the control cylinder.
In this particular arrangement, only as an example of cylinder and rod size, the mud pump cylinder may be six inches in diameter with a twelve inch stroke, using the pistons of two driving cylinders of two inch diameter each to drive the one mud pump piston. A significant advantage can be achieved by making the rods of the driving cylinders larger in diameter (1.375 inches, for example) than that of the mud pump cylinder rod (1.25 inches, for example). It enables use of larger and longer wearing bearings in the driving cylinders, and enables the use of a relatively small piston rod and packing gland 17 in the mud pump cylinder, thus minimizing exposure to wear of the packing gland. The combination of the large diameter rods in the driving cylinders, fixed to a rigid rod connector plate 22 to which the mud pump cylinder rod is bolted, contributes to a very rigid structure. It avoids the necessity of a very long arrangement and long piston rod spans which would be necessary if the mud pump cylinder was driven by a single piston in a hydraulic cylinder on the same longitudinal axis. That would require a more complicated bearing arrangement to support the mud pump cylinder rod. In the present arrangement, the cylinder rod bearings are relatively close to the mud pump packing gland, helping extend the life of the gland by minimizing radial working and resulting loading of the mud pump rod on the packing gland. Also, with the present arrangement, the driving cylinder rods are in tension when the mud pump rod is in compression, which reduces the bending moment.
The proximity sensor switches A-1 through D-1 are responsive to movement of an actuator such as flange 19F on rod 19R, 19S. These switches may be normally-closed or normally-open switches as a matter of convenience in the construction of the circuitry. It should be understood, of course, that the other half of the duplex double acting pump assembly which includes cylinder 2, has driving cylinders such as 29 and 31 associated with it, and proximity switches associated with the piston rod of one (29, for example) of those driving cylinders, (shown in FIGS. 3 and 5A) in the same manner as for the assembly shown in FIG. 2. The position of the piston in cylinder 1 is preferably in a different location and/or it is moving in a different direction, from that of the piston in cylinder 2.
Referring now to FIG. 3, mud pump cylinder 1 and mud pump cylinder 2 are shown schematically, as is one cylinder of each set of two driving cylinders for each of the two mud pump cylinders 1 and 2, respectively. Since the mud pump cylinders are virtually identical and the two driving cylinders of the set for each of the mud pump cylinders are virtually identical, a description of one driving cylinder and associated controls will suffice for both.
The output from flow divider D enters the center input port of a two-position, solenoid-actuated, spring-return hydraulic valve V-1. This valve is electrically coupled to a relay switch R-1 which is bi-stable and electrically coupled to the proximity sensor switch A-1. An example of a suitable relay is No. 700-HJD32Z12 by Allen-Bradley. It is a DPDT latching relay. One switched position of this relay switch R-1 causes the solenoid to be energized to open the valve and supply pressurized oil from valve V-1 through line L-1 to the one end of cylinder 19 and likewise cylinder 21 of FIGS. 2 and 5 to drive the pistons in the direction of the arrow 23. This occurs in both driving cylinders 19 and 21, so rod 13R, being mechanically fixed to the two driving cylinder rods 19R and 21R by rod connector plate 22, is likewise driven in the direction of the arrow 23. When relay R-1 is reset by a signal from another proximity switch which can be recognized upon study of FIGS. 4A through 4D, it de-energizes the solenoid for valve V-1, enabling the spring therein to return the solenoid to position where the supply to the cylinder 19 is through line L-2, to reverse the direction of the piston in that cylinder and its companion driving cylinder, thus reversing the direction of the mud pump piston 1P. Whichever side of the piston is not pressurized at any time is enabled to dump through the valve V-1 to sump S-1. Essentially the same arrangement exists for control and drive of mud pump cylinder 2. In this instance, the proximity switches are designated A-2, B-2, C-2 and D-2. The relay switch is R-2 and the control valve is V-2 operated by a solenoid. It should be mentioned at this point, however, that while the pistons in the driving cylinders for one of the mud pump cylinders are located in the same relationship to each other as the mud pump cylinder with which they are associated, they are typically out of phase with respect to the mud pump piston and pistons of associated drive cylinders of the other mud pump cylinder. This is intentional in an effort to be sure that the flow out of the mud pump assembly 5 is as stable and constant as possible. That is the goal to which the organization of the proximity switches and associated relay switches are directed. Also with reference to FIGS. 2 and 3, it should be mentioned that the supply lines L-1 and L-2 to cylinder 19 are larger than the lines from cylinder 19 to cylinder 21. This is because the lines from valve V-1 go directly to only one of the two driving cylinders and from that point, are directed to the other driving cylinder. Thus, the supply lines L-1 and L-2 must be large enough to drive both driving cylinders 19 and 21 with essentially equal pressure and volume capacity. This is shown schematically in FIG. 2 with lines B-1 and B-2 from cylinder 19 to cylinder 21.
Referring now to FIGS. 4A through 4D, along with FIG. 3, FIG. 4A is a simplified portion of FIG. 3. It includes a driving cylinder 19 for mud pump cylinder 1, and driving cylinder 29 for mud pump cylinder 2. It also shows the proximity switches A-1 and B-1 associated with the piston rod portion 19S of cylinder 19. Similarly, proximity switches A-2 and B-2 associated with the piston rod 29S of driving cylinder 29, are shown. The position of the rod 19S relative to rod 29S is only for purposes of example, as it is not expected that the pistons of cylinders 1 and 2 will ever be positioned at the same longitudinal location relative to each other unless they are passing as one goes in one direction and the other goes in the other direction. But the purposes of the proximity switches A-1 and B-1 is to limit the travel of the piston in the two directions. Thus, either the switch A-1 or the switch B-1 can set or reset relay R-1 to cause the valve V-1 to shift and switch the high pressure from valve V-1 to either line L-1 to move the driving piston and thereby the mud pump piston 1P to the right, or apply the high pressure to line L-2 and drive the driving piston and thereby, the mud pump piston 1P to the left. Regardless of which direction the mud pump piston is moving, it will be drawing mud from the chip separation tank 6 and discharging it to the manifold connected to discharge line 7. The arrangement and operation is true regarding driving cylinder 29 and the proximity switches and relay R-2 and valve V-2 associated with that piston rod 29S.
To assure that the pistons of the two mud pump cylinders are never at either end limit of their strokes simultaneously, two additional proximity switches C-1 and D-1 (FIGS. 4B and 4D) are added. Each of these can be located about 2 inches, for example, from the proximity switches A-1 and B-1 and functions in the same way as described above with respect to switches A-1 and B-1.
The control system of FIG. 4D provides the combination of components to achieve two objectives. The first, and probably the more important, is to insure that the set of power cylinders 19 and 21 for mud pump cylinder No. 1 will cycle independently of the set of power cylinders 29 and 31 for mud pump cylinder 2, providing a 12 inch stroke for each of the mud pump cylinder rods independently of the other rod. A scheme for accomplishing this is shown generally in FIG. 4A where the sensor A-1 or the sensor B-1 can energize the latching relay R-1 at opposite ends of the piston rod stroke.
Another objective is to build a system which will insure that the piston 1P for mud pump cylinder 1 does not reach the end of its individual stroke at the same time as the piston 2P for mud pump cylinder 2. That could occur when both pistons are side-by-side and going in the same direction (FIG. 4B, for example) or when they are phased 180 degrees apart, so going in opposite directions and nearing the ends of their strokes (FIG. 4C, for example). These conditions are more complex and are addressed by the additional components shown in FIGS. 4B and 4C.
In addressing this problem, it should be recognized that the mud pump pistons could arrive at the ends of their strokes at the same time even if not necessarily together mid-stroke, but they would probably have been together at least a short distance before they reached the ends of their strokes. In FIGS. 4B and 4C and the above description, a two inch distance from the end of the stroke is mentioned and shown, but this distance could be one inch or some other suitable distance. If the two pistons are together a short distance from the end of their strokes, it is likely that they would reach the end of their strokes at essentially the same time.
Since reaching the end of the stroke simultaneously for both mud pump pistons is not desirable, the present invention reverses one of the two pistons prior to reaching the normal end of the stroke. When one piston reverses, its stroke has been limited at 10 inches. This will place the two mud pump pistons out of phase for an extended period. For this purpose, the additional proximity switches C-1 and D-1 for piston rod 19S, and C-2 and D-2 for piston rod 29S, are added, as mentioned above. For the right combination of signals, to correctly use the proximity switches C-1, C-2, D-1 and D-2, additional relays R-3, R-4, R-5 and R-6 can be used. An example is a DP/DT, a stable (non-latching) relay by Siemens, Potter & Brumfield Division.
The combination of the foregoing components for the control functions as described above and shown in FIGS. 4A, 4B and 4C, results in the control component organization of FIG. 4D which is a consolidation of the systems of FIGS. 4A, 4B and 4C, to achieve the above-mentioned goals of having the power cylinder set for mud pump cylinder 1, cycle independently of the power cylinder set for mud pump cylinder 2, and avoiding the simultaneous arrival at the end of their strokes of mud pump piston 1 and mud pump piston 2. At this point it should be understood that specific implementation of controls is not limited to the above-described organization of proximity switches, activators for them, types of valves or relays, whether electrically or pneumatically controlled, or the specific organization of an electrical, pneumatic, or optical control circuit, for example, portions of which may be solid state discrete devices, or integrated circuit organizations, as it will depend largely on the preference of and choices by a control circuit designer and well within the skill of the art of one who understands the organization and intentions and implementation described above, according to the present invention.
Initially, in the practice of the present invention according to the illustrated embodiment, it is intended that valving and control as shown in FIG. 4D and described above, or in such other scheme as may be preferred, be used so that when a constant flow of hydraulic oil is delivered into the system by the hydraulic pump P, relatively constant mud flow from the double acting duplex mud pump will be possible. With the present invention, the flow divider D (FIG. 1) is truly a flow divider, attempting to deliver the same volume at both outlet ports. To do so, it attempts to adapt to any difference in operation of one of the mud pump pistons relative to the other, by adjusting the pressure. For example, if the piston rod packing in one mud pump cylinder is tighter on the rod than on the other mud pump cylinder, the flow divider spool centering springs will tend to move the spool in a direction attempting to establish the same amount of flow to both of the hydraulic oil driving cylinders. Also, when one mud pump driving cylinder set piston reaches the end of its stroke, what would otherwise appear to be a sharp rise in pressure to be handled by the flow divider, can be tolerated by the flow divider itself so as to avoid damaging mechanical or hydraulic shock. This effect is somewhat mirrored in FIG. 7 which shows in the solid lines, the wave form of pressure available from the mud pump cylinder 1 for one stroke cycle, that being a full stroke from left to right, and a full return stroke from right to left in FIG. 3, for example. The dashed wave form represents the available pressure from mud pump cylinder No. 2. In this illustration, the discharge pressure in cylinder 1 begins a sharp rise from 0 at point A to a maximum available pressure at point M and then drops sharply beginning at point N to 0 at point R. Then it rises on the opposite side of the piston sharply at point R to the same maximum level and then drops again to 0 at point S. Meanwhile, if the pistons of the two mud pump cylinders happen to be operating at 90° phase relationship, the available pressure from the cylinder No. 2 follows the dashed line. Both of these pressure “curves” are essentially a square wave, in contrast to the somewhat sinusoidal output of a conventional, crankshaft-driven duplex piston pump. At point A, when the pistons in the driving cylinders for cylinder 1 get to the end of their stroke, the hydraulic pressure on the driving pistons rises sharply until the pistons begin moving in the opposite direction. This is because of the fact that, when the pistons of either driving cylinder set reach the end of their stroke, and the related solenoid valve is shifting to change the direction of the piston, there is no flow of oil through this valve. With a constant input flow of oil, it must be re-routed to prevent pressure build-up in the system and popping pressure relief valve, and also to prevent a volume drop in the discharge of the mud pump. The flow divider D has tolerance to enable this temporary re-routing to the driving cylinders 29 and 31. At the same time, with the additional pressure on these cylinders driving pump 2, a pressure spike may result in mud pump cylinder 2 such as shown in the dashed line at A and R and S in FIG. 7. The spike could be at other locations, depending upon the phase relationship of the cylinder set for mud pump cylinder 1 and the cylinder set for mud pump cylinder 2. Thus with a less than 100% accuracy-style flow divider D, the excess oil from one shifting solenoid valve is routed to the other (open) solenoid valve and driving cylinder set, which increases in speed and keeps the mud pump discharge constant. The oil itself becomes an accumulator and pressure relief system, operating at the exact same pressure over the full range of the operating system and produces the effect of constant velocity pistons in the mud pump.
Since these driving pistons are not driven by a crank shaft, they operate at essentially constant velocity. In other words, whereas a piston driven by a rotating crank shaft moves according to a harmonic sine wave pattern, a piston driven according to the present invention defines essentially a square wave pattern. In a conventional pump where the piston is driven by a rotating crank shaft, the inlet and outlet valves must be designed and sized to permit maximum flow, which typically occurs at the time of maximum travel of the piston, which occurs when the crank pin axis and rotational axis of the crank shaft are in a plane perpendicular to the axis of the piston. In contrast with construction according to the present invention, the inlet and outlet valves are sized to a maximum flow which is essentially constant regardless of where the piston is during its stroke, and which is only limited by the flow available from the flow divider. Therefore, as an example, where a conventional 5×6 mechanically driven pump using 5×6 valves, would handle about 150 gallons per minute, a pump according to the present invention with a 5″ diameter bore and 6″ stroke could be expected to produce on the order of 300 gallons per minute although using the same size “5×6” valves. Accordingly, the present invention provides the possibility of approximately twice the volume capacity with significantly less space and weight by virtue of the essentially constant velocity pistons, and significantly less overall length.
Referring again to FIG. 3, with the pump P delivering 36 gallons per minute, for example, the flow divider delivers approximately 18 gallons per minute through each output port, and which is delivered to the hydraulic driving cylinders. It should be understood that pumps having other capabilities in terms of volume and pressure can be employed. The 36 gallon per minute number is selected to match one combination of pump valves and suction hose size. Other combinations can be made for other sizes of suction hose, valves, and operating speeds, and are within the skill of the art. If there is no imbalance in the loads on the pistons of these sets of hydraulic cylinders, each of them can move at the rate determined by 18 gallons per minute flow into the cylinder at 1,000 psi (ignoring friction losses in the lines).
Because of the relative differences in sizes of the driving cylinders and the mud pump cylinders, and again, ignoring friction losses, the mud pump cylinders will be able to deliver 100 gallons per minute at 200 psi.
As suggested above, in the practice of the present invention, the oil of the piston pump system is used to absorb the undesirable pressure peaks of the primary hydraulic system. Resistance of the mud pump hydraulic system can offset the inertia of the traveling pistons and the piston rods when they reach the end of their stroke. The problem of moving excess oil during the time the valve spools are shifting, is addressed to avoid pressure peaks and consequent opening of the relief valves on each stroke. This problem of moving excess oil is solved by using an open system between the two sets of driving pistons. When the control valves close to change the direction of one set of pistons, the oil is free to flow to the other set of pistons which may be in the middle of their stroke operating at the same pressure. The volume of liquid lost in one mud pump cylinder is made up by the increase in the other, insuring that the mud pump discharge remains constant.
The pressurized side of a hydraulic cylinder is free to accelerate, based on the flow of oil being supplied. But the suction side of a mud pump piston has additional forces. Such piston velocity can only accelerate at a rate based on the flow of liquid moving through the suction valve. When a force is applied to increase the piston to a speed exceeding the incoming flow, increased vacuum forces or cavitation develops and the mud pump cylinder walls tend to deteriorate. Using an open-type system according to the present invention, some portion of supplied driving oil is free to move from the driving cylinder set for the starving cylinder through the flow divider to the driving cylinder set, reducing the acceleration rate and damage to the starving mud pump cylinder walls. Thus in the present invention, the primary hydraulic system can constructively interact with pressures of the secondary, mud management system.
In the water well drilling field, the application of a mud pump requires it to operate from zero to maximum pressure and zero to maximum flow as the drilling proceeds. This eliminates the opportunity to use standard accumulators and limit switches, as such devices must always be preset or designed for a given pressure. By using the open-to-atmosphere concept in the present invention, one of the two hydraulic piston sets is always working against the pressure developed by the resistance of the liquid (mud) being pumped. This liquid thus serves as an accumulator which is always working at the exact pressure required. Since the pressure is a function of the resistance of the fluid and the atmosphere, no relief valve is required.
While, the hydraulic driving cylinders are shown on top and bottom of a mud pump cylinder, other embodiments of the invention might have them beside or otherwise related to the mud pump cylinder as long as the piston rods of the hydraulic cylinders are somehow connected to the piston rod of the mud pump cylinder, so as to drive the mud pump piston. Also, some inventive aspects can be implemented with only a single hydraulic power cylinder for each mud pump cylinder, but using the accommodating flow divider and valve control system disclosed herein. While it is possible to make the cylinders the movable components, and other mixes and mechanical arrangements of rods and cylinders are possible, it is believed that making the rods the movable components simplifies the organization. In summary, the introduction of hydraulic power cylinders into a mud pump according to the present invention, eliminates the use of the complete power end (crankshaft, flywheel, etc.) of a conventional mechanically powered mud pump. Instead the cylinder power source provides a relatively constant velocity piston to move fluid at the piston"s rated flow essentially the full length of its design stroke. This permits a pump design with much smaller operating valves than would otherwise be required for the capacity required, contributing to a much smaller unit in size and weight.

This application is a continuation of pending U.S. patent Ser. No. 12/220,876 entitled “A Reinforced Smart Mud Pump” which take priority to provisional application for patent filed Jul. 30, 2007 bearing Ser. No. 60/962,637 and is incorporated by reference herein as if fully set forth.
This invention relates generally to the field of mud pumps and more specifically to a reinforced smart mud pump. Mud pumps that use piston displacement, produce imposed forces that cause wear and tear on various pump components, including pump cross head piping, cylinders, inlet and discharge valves, seal components including piston or plunger seals, the pump cylinder block or so-called fluid end, and other components. There has been a need to provide increased longevity and performance for such pumps and to determine if deteriorations in pump performance are occurring, to analyze the source of decreased performance and to further real time control and data to monitor and in some cases change the operating characteristics before damage occurs to the pump. The use of greatly strengthened components in combination with a computer controlled system integrated with a real time monitored and controlled reset relief valve may be integrated into an oilfield application to prevent catastrophic pump failure and extend pump life.
Pump operating characteristics often have a deleterious effect on pump performance. For example, delayed valve closing and sealing can result in loss of volumetric efficiency. Factors affecting pump valve performance include fluid properties, valve spring design and fatigue life, valve design and the design of the cylinder or fluid end housing. Delayed valve response also causes a higher pump chamber pressure than normal which in turn may cause overloads on pump mechanical components, including the pump crankshaft or eccentric and its bearings, speed reduction gearing, the pump drive shaft and the pump prime mover. Moreover, increased fluid acceleration induced pressure “spikes” in the pump suction and discharge flowstreams can be deleterious. Fluid properties are also subject to analysis to determine compressibility, the existence of entrained gases in the pump fluid stream, susceptibility to cavitation and the affect of pump cylinder or fluid end design on fluid properties and vice versa.
Still further, piston or plunger seal or packing leaking can result in increased delay of pump discharge valve opening with increased hydraulic flow and acceleration induced hydraulic forces imposed on the pump and its discharge piping. Moreover, proper sizing and setup of pulsation control equipment is important to the efficiency and long life of a pump system. Pulsation control equipment location and type can also affect pump performance as well as the piping system connected to the pump
In prior art, the control of a mud pump has been disclosed focused on piston position for acquiring information about the pump and its performance characteristics. For example, U.S. Pat. No. 6,882,960 to Miller, shows a system for monitoring and analyzing performance parameters of reciprocating piston, or power pumps and associated piping systems. This patent fails to disclose the innovative aspects of the present invention.
Nothing in the prior art shows a computer integrated mud pump with significant strengthening features that increase the life cycle of a pump in the manner of the present invention with real time control of significant operating functions and feedback from various sensors and reset relief valves.
Another advantage of the invention is to provide a mud pump that utilizes transducers in line with the ambient pressure in conjunction with a computer controlled pressure relief valve to record and monitor pump characteristics and control the pump to prevent catastrophic failure.
Another advantage of the invention is to provide a mud pump that transmits data to a computer for later analysis of important operating characteristics.
A further advantage of the invention is to provide a mud pump that can be controlled during its operation to prevent certain damaging events to the pump or underlying pressurized system.
In accordance with a preferred embodiment of the invention, there is shown a pump system for movement of fluids having a reciprocating piston power pump having at least three reciprocating pistons operable to displace fluid from a housing having a pumping chamber, an integrally forged crankshaft operably connected to the pistons, at least one sensor operable to sense ambient conditions on the pump, and a computer control for processing data from the sensor to regulate the operation of the pump in response to the data.
In accordance with a preferred embodiment of the invention, there is shown a pump system for movement of fluids having a reciprocating piston power pump having at least three reciprocating pistons operable to displace fluid from a housing having a pumping chamber, an integrally forged crankshaft operably connected to the pistons, polyflorocarbon infused treatement applied to at least one crosshead and one crosshead slide in the system, and at least one sensor operable to sense ambient conditions on the pump.
In accordance with a preferred embodiment of the invention, there is shown a pump system for movement of fluids having a reciprocating piston power pump having at least three reciprocating pistons operable to displace fluid from a housing having a pumping chamber, an integrally forged crankshaft operably connected to the pistons, at least one sensor operable to sense ambient conditions on the pump, a computer control for processing data from the sensor to regulate the operation of the pump in response to the data; and pressure sensors for monitoring fluid pressure operably connected to the computer control. In addition, upper and lower limits to temperature, vibration and pressure can be set. Further, in a preferred embodiment, all lubrication and water pumps must be on before the control system will permit unit to be operated.
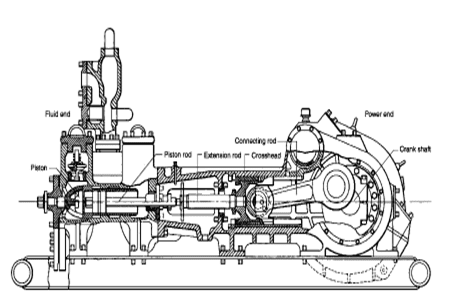
In a preferred embodiment of the present invention, there is shown a reciprocating plunger or piston power pump. The pump includes additional features not found in conventional reciprocal pumps as heretofore described. The basic operation of the pump is similar to a triplex plunger pump configured to reciprocate three spaced apart plungers or pistons, which are connected by suitable connecting rod and crosshead mechanisms, to a rotatable crankshaft or eccentric. FIG. 1 shows a side view of the pump and auxiliary equipment according to a preferred embodiment of the invention. Pump housing 100 covers the internal pump components and allows for a variety of conventional means to move the rotatable crankshaft 114 such as an electric motor 102 and belt drive 104. Within pump housing 100 may be disposed a pressurized lubrication spraying system that continuously feeds lubricant such as oil around the crankshaft and associated internal pump components.
A suction module 104 of conventional design houses each plunger which operates each section of the triplex plunger pump. A pressure relief valve mount 110 allows for attachment of a reset relief valve (show in FIG. 5) to at least one suction module 106 in a system for pumping drilling mud composed of water, clay and chemical additives, down through the inside of a drill pipe of an oil well drilling operation. The drilling mud is pumped at very high pressure so the mud is forced out through a bit at the lower end of the drill pipe and returned to the surface, carrying rock cuttings from the well. In this illustrative example the drilling mud from the pump system is fed into the attached vessel 112 sometimes known as a dumping ball. In a preferred embodiment all components are installed on a full unitized skid 120 providing room for motors, starters, sheaves, belts and any associated test equipment and a solid platform for installation of bracing 122 for component parts. Vessel 112 smoothes out the pulsation caused by the pumping action of the system to deliver pumped fluid out of port 115 in a more controlled manner.
With the use of computer modeling, high technology engineering, metallurgical and mechanical enhancements, the smart pump is revolutionary in design. The pump is manufactured using advanced materials and techniques including an integrally forged and balanced crank. This provides significant strength advantages and increases the life cycle of the pump. Unlike prior art pump systems, the crank is not a porous unbalanced crank casting, nor is it a fabricated with separate plates and bars and later welded together. As shown in FIG. 2 the crank 200 is fabricated from an integrally forged single ingot by the open hammer forging process resulting in a single piece with no welding or pinning of multiple pieces. A connecting rod 202 for each plunger is attached to the crank 200 such that the crank freely rotates and creates a reciprocating action in each connecting rod 202 attached to the crank 200. A crosshead 204 and crosshead slide 206 attach to each connector rod to help retain engine oil in the crankcase. A plunger connection 210 at each connector rod 202 end provides a means of attachment for a variety of rod and plunger components.
All of the ground crossheads 204 and honed crosshead slides 206 are treated with a polyflorocarbon coating for more lubricity and wear performance characteristics resulting in 15% less energy cost. This process has been used in the racing industry with much higher performance results. The poly-fluorocarbon coating is applied to each crosshead and slide and helps retain engine oil on the component surfaces during intense heat and extreme pressure. The oil is essentially absorbed into each crosshead 204 and slide 206 in such a way as to increase their lubricity. The crosshead 204 center line alignment is laser monitored for even wear. In a preferred embodiment of the invention the pump uses suction modules, discharge modules and discharge manifold and a double helical gear set. All gear sets are prepared with mesh test providing contact tapes accompanied by digitals to AGMS 11+ standards. All gear sets are further preferably chemically treated to 0.4 RMS or better to exponentially increase bearing life.
In the present invention, the crankshaft is a integrally forged piece to increase its operating strength significantly, and is an integral part of the crank 200. The terms crank 200 and crankshaft are used interchangably although in conventional pumps and engines the crank 200 and crankshaft may comprise separate components. Turning again to FIG. 1 we see the crankshaft includes a rotatable input shaft portion adapted to be operably connected to a suitable prime mover, such as an internal combustion engine or electric motor 102, as an exemplary installation. The crankshaft is mounted in a suitable, so-called power end housing 114 which is connected to a fluid end structure configured to have a plurality of pumping chambers, in this example, three separate pumping chambers exposed to their respective plungers or pistons. Plungers refer to the rod, rod joints and piston end portions of the plunger unless otherwise specified.
FIG. 3 shows a partial cutaway side view of the pump according to a preferred embodiment of the invention. The fluid end comprises a housing having the series of plural cavities or chambers for receiving fluid from an inlet manifold by way of conventional poppet type inlet or suction valves contained each suction module 300. The piston or plunger 304 projects at one end into the chamber and is connected to a suitable crosshead mechanism 306, including a crosshead extension. The crosshead extension is operably connected to the crankshaft using connecting rods 308 as described above. Each plunger 306 projects through a conventional packing 310 or plunger 306 seal. Each chamber for each plunger 306 is operably connected to a discharge piping manifold by way of a suitable discharge valve. Valves may be of a variety of conventional designs and are typically spring biased to their closed positions. Valves may also include or are associated with removable valve seat members. Each valve may also have a seal member formed thereon engageable with the associated valve seat to provide fluid sealing when the valves are in their respective closed and seat engaging positions. A unique feature of a preferred embodiment of the the smart pump is a positive air pressure plunger seal 312 to prevent leakage and prevent wear on the plunger. FIG. 3A shows a cross sectional view of the positive air pressure plunger seal about a synchronized plunger according to a preferred embodiment of the invention. As the plunger 350 moves reciprocally, pressurized air is introduced into through seal 352 through a plurality of pressurized air ports 354 preventing fluid leakage from the plunger 350 end which engages and moves drilling mud through the aforementioned valves. The pressurized air flow 356 isolates any material from scoring and etching the plunger 350 and reduces friction between the seal wall and the plunger 350.
In a preferred embodiment the pump may be fitted with a P-QUIP ® fluid end systems including P-QUIP ® kwik clamp liner retentions system, P-QUIP ® kwik rod system and cover system. The P-QUIP ® kwik-clamp valve and strainer cover retention system has a very fast and safe access with much reduced down time and LTAs (Lost Time Accidents) due to mishaps. Hammers or cheater bars are not required and the system includes an automatic clamping means which results in no more under or over tightening—caps will not loosen off in use. This all results in easy installation and easy operation with conventional air or hand operated hydraulic pump. Like the Liner Retention System, the valve and strainer covers are sealed firmly in the fluid end by means of a spring mechanism. Similarly, the outer cover is removed when the clamping force is released by means of the hydraulic pump. This system heightens safety as it is no longer necessary to tighten OEM type threaded cap retainers by hammer.
The P-QUIP ® kwik rod system allows for fast and safe piston changes and is constructed of 17.4 PH martensitic high-resistance stainless steel, eliminating corrosion. Three piece rod system is held together using pins, which eliminates prior systems and clamp type systems. The P-QUIP ® kwik cover system allows for fast and save valve access changes with no hammers or cheater bars. The cover offers a positive retention force against the plug eliminating the need for retightening. The P-Quip ® kwik rod pump rod system permits fast and safe piston changes resulting in reduced down time. There is no need for heavy clamps or connecting threads and studs. The clamping force is automatically controlled resulting in no broken rod ends. Due to its construction, its self alignment facility gives improved piston and liner life. There are no corrosion problems as all parts are stainless steel, including hard-surfaced stainless steel power end rods. It has an integral liner flushing systems.
On conventional mud-pump rod systems, the rod is held together by means of taper clamps and screw threads which are slow and awkward to assemble correctly and readily wear out. Due to their design, the clamps obscure vision of the rod joints, preventing a check being made that the rod is correctly aligned. Uneven loads are imposed on the flanged rod ends, resulting in premature failure.
The P-QUIP ® Kwik-Rod system avoids these problems as the rod components are held together by powerful spring-loaded ends on a release link in the center of the rod assembly. The ends of the release link are attached to the pony rod and piston rod by means of high tensile stainless steel pins held in shear. The shear force is very quickly and easily released by a few strokes of a small hydraulic pump.
Dismantling and re-assembly of the complete rod system takes under one minute. Furthermore, there are no flanged joints on the rods to chip, wear or break. Hence, rod life is enhanced and, because rod alignment is readily achieved, significantly improved swab and liner life is generally obtained. FIG. 4 shows a partial cutaway overhead of the pump housing according to a preferred embodiment of the invention. Plunger rods 400 are synchronized based on the crank speed and can be checked for alignment as described herein. In a preferred embodiment, a viewing port 402 or access cover allows access to plunger rods 400 for alignment and maintenance.
Further enhancement to the pump is achieved by use of ductile iron for the crossheads, the crosshead slides and the connecting rods. The connecting rods are solid ductile iron which reduces their elongation during setoff to zero. The typical rod experiences stretching or elongation during set-off when the relief valve is activated. The benefit of ductile iron in increased strength and higher tensile strength. All the major components, the crank, the crossheads, the slides and the rods by use of mettalurgical engineering are designed to bring the pump tensile strength up to 200,000 p.s.i.
The pump is network and web based with a data acquisition system to monitor pump performance and constantly evaluate pump valve dynamics. Pressure transducers are located in pump chambers used to determine valve sealing delays, fluid compression delays, chamber overshoot pressure, crosshead loading shock forces and chamber volumetric efficiency. Pressure transducers are also located in suction piping and manifolds and discharge piping and manifold. Temperature is similarly monitored for fluid temperature for mud properties and power end lubrication. Further, there is real time power input data to calculate system mechanical efficiency.
Those skilled in the art will recognize that the present invention may be utilized with a wide variety of single and multi-cylinder reciprocating piston power pumps as well as possibly other types of positive displacement pumps. However, the system and method of the invention are particularly useful for analysis of reciprocating piston or plunger type pumps. Moreover, the number of cylinders of such pumps may vary substantially between a single cylinder and essentially any number of cylinders or separate pumping chambers and the illustration of a so called triplex or three cylinder pump is exemplary.
The performance analysis system of the invention is characterized, in part, by a digital signal processor which is operably connected to a plurality of sensors via suitable conductor means well known in the art. The processor may be of a type commercially available as previously described and may wireless remote and other control options associated therewith. The processor is operable to receive signals from a power input sensor which may comprise a torque meter or other type of power input sensor. Power end crankcase oil temperature may be measured by a sensor. Crankshaft and piston position may be measured by a non-intrusive sensor including a beam interrupter mountable on a pump crosshead extension for interrupting a light beam provided by a suitable light source or optical switch.
A vibration sensor may be mounted on the power end or on the discharge piping or manifold for sensing vibrations generated by the pump. Suitable pressure sensors are adapted to sense pressures at numerous locations, including the inlet piping and manifolds. Other pressure sensors may sense pressures in the pumping chambers of the respective plungers or pistons. Other pressure sensors sense pressures upstream and downstream of a discharge pulsation dampener. Still further, a fluid temperature sensor may be mounted on discharge manifold or piping to sense the discharge temperature of the working fluid. Fluid temperature may also be sensed at the inlet or suction manifold.
Pump performance analysis using the system may require all or part of the sensors described above, as those skilled in the art will understand and appreciate from the description which follows. The processor may be connected to a terminal or further processor, including a display unit or monitor mounted in a housing connected to the pump system and main housing. Still further, the processor may be connected to a signal transmitting network, such as the Internet, or a local network.
FIG. 4A shows a schematic drawing of a representative computer controlled monitoring system. A computer 450 receives input from from sensors 452 and modules 454 in the pump system and uses software algorithyms to analyze pump performance, record and display operational data on a visual screen display 456. The computer controlled monitoring system may be adapted to provide a wide array of graphic displays and data associated with the performance of a power pump on a real time or replay basis. A substantial amount of information is available including pump identification (Pump ID) crankshaft speed, fluid flow rate, time lapse since the beginning of the display, starting date and starting time and scan rate. The display 456 displays discharge piping operating pressure, peak-to-peak pressures, fluid flow rate induced peak-to-peak pressure, fluid flow induced peak-to-peak pressure as a percentage of average operating pressure, pump volumetric efficiency and pump mechanical efficiency. The display 456 also indicates discharge valve seal delay in degrees of rotation of the crankshaft from a so called piston zero or top dead center (maximum displacement) starting point with respect to the respective cylinder chambers of the pump, as well as piston seal pressure variation during fluid compression and suction valve seal delay in degrees of rotation of the crankshaft or eccentric from the top dead center position of the respective cylinder chambers. Still further, the pump type may be displayed as well as suction piping pressures, as indicated. The parameters displayed are determined by the system of the invention which utilizes the various sensors.
Various pressure sensors 452 sense pressure in the respective pump chambers associated with each of the pistons and pressure signals are transmitted to the processor. These pressure signals may indicate when valves are opening and closing. For example, if the pressure sensed in a pump chamber does not rise essentially instantly, after the piston for that chamber passes bottom dead center by 0 degrees to 10 degrees of crankshaft rotation, then it is indicated that the inlet or suction valve is delayed in closing or is leaking. In situations like this, the display may show that a discharge valve is not closed for 16.7 degrees of rotation after piston top dead center position. Accordingly, pressure changes, or the lack thereof, are sensed by cylinder chamber pressure sensors.
Software embedded in the computer 450 processor is operable to correlate the angle of rotation of the crankshaft with respect to pressure sensed in the respective cylinder chambers to determine any delay in pressure changes which could be attributable to delays in the respective suction or discharge valves reaching their fully seated and sealed positions. These delays can, of course, affect volumetric efficiency of the respective cylinder chambers and the overall volumetric efficiency of the pump. In this regard, total volumetric efficiency is determined by calculating the average volumetric efficiency based on the angular delay in chamber pressure increase or pressure decrease, as the case may be, with respect to the position of the pistons in the respective chambers.
The volumetric efficiency of the pump is a combination of normal pump timed events and the sealing condition of the piston seal and the inlet and discharge valves. Pump volumetric efficiency and component status is determined by determining the condition of the components and calculating the degree of fluid bypass. Pump volumetric efficiency (VE) is computed by performing a computational fluid material balance around each pump chamber.
Pump chamber pressures, as sensed by the sensors may be used to determine pump timing events that affect performance, such as volumetric efficiency, and chamber maximum and minimum pressures, as well as fluid compression delays. Still further, fluid pressures in the pump chambers may be sensed during a discharge stroke to determine, through variations in pressure, whether or not there is leakage of a piston packing or seal, such as the packing seal. Still further, maximum and minimum chamber fluid pressures may be used to determine fatigue limits for certain components of a pump, such as the fluid end housing, the valves and virtually any component that is subject to cyclic stresses induced by changes in pressure in the pump chambers and the pump discharge piping.
As mentioned previously, the computer 450 processor may be adapted with a suitable computer program to provide for determining pump volumetric efficiency which is the arithmetic average of the volumetric efficiency of the individual pump chambers as determined by the onset of pressure rise as a function of crankshaft position (delay in suction valve closing and seating) and the delay in pressure drop after a piston has reached top dead center (delay in discharge valve closing and seating).
Additional parameters which may be measured and calculated in accordance with the invention are the so-called delta volumes for the suction or inlet stabilizer and the discharge pulsation dampener. The delta volume is the volume of fluid that must be stored and then returned to the fluid flowstream to make the pump suction and discharge fluid flow rate substantially constant. This volume varies as certain pump operating parameters change. A significant increase in delta volume occurs when timing delays are introduced in the opening and closing of the suction and discharge valves. The delta volume is determined by applying actual angular degrees of rotation of the crankshaft with respect the suction and discharge valve closure delays to a mathematical model that integrates the difference between the actual fluid flow rate and the average flow rate.
Another parameter associated with determining component life for a pump, is pump hydraulic power output for each pump working cycle or 360 degrees of rotation of the crankshaft. Still further, pump component life cycles may be determined by using a multiple regression analysis to determine parameters which can project the actual lives of pump components. The factors which affect life of pump components are absolute maximum pressure, average maximum pressure, maximum pressure variation and frequency, pump speed, fluid temperature, fluid lubricity and fluid abrasivity.
As mentioned previously, pressure variation during fluid “compression” is an indication of the condition of a piston or plunger packing seal. This variation is defined as an absolute maximum deviation of actual pressure data from a linear value representative of the compression pressure and is an indication of the condition of seals. A leaking seal results in a longer compression cycle because part of the fluid being displaced is bypassing or leaking through the seal. A pump chamber “decompression” cycle is also shorter because, after the discharge valve completely closes and seals against its seat, part of the fluid to be decompressed is bypassing a plunger seal or packing. The difference in volume required to reach discharge operating pressure over a “compression” cycle for each pump chamber determines an average leakage rate. This leakage rate is adjusted for a leak rate at discharge operating pressures by calculating a leak velocity based on standard orifice plate pressure drop calculations.
Suction valve leak rate results in a longer decompression cycle because part of the fluid being displaced by the pressurizing element is returning to the pump inlet or suction fluid flowline. The difference in volume required to reach discharge operating pressure over a compression cycle determines an average leakage rate. This compression leak rate is then adjusted for a leak rate at discharge operating pressures by calculating a leak velocity based on standard orifice plate pressure drop calculations. The leak rate is then applied to the duration of the discharge valve open cycle. So-called pump intake or suction acceleration head response is an indicator of the suction piping configuration and operating conditions which meet the pump"s demand for fluid. This is defined as the elapsed time between the suction valve opening and the first chamber or suction piping or manifold pressure peak following the opening.
Still further, the system of the present invention is operable to determine fluid cavitation which usually results in high pressure “spikes” occurring in the pumping chamber during the suction stroke. Generally, the highest pressure spikes occur at the first pressure spike following the opening of a suction valve. Both minimum and maximum pressures are monitored to determine the extent and partial cause of cavitation.
The system is also operable to provide signals indicating valve design and operating conditions which can result in excessive peak pressures in the pumping chambers before the discharge valve opens, for example. These peaks or so-called overshoot pressures can result in premature pump component failure and excessive hydraulic forces in the discharge piping. For purposes of such analysis, the overshoot pressure is defined as peak chamber pressure minus the average discharge fluid pressure.
The system of the present invention is also operable to analyze operating conditions in the pump suction and discharge flow lines, such as in the piping. A normally operating multiplex power pump will induce pressure variations at both one and two times the crankshaft speed multiplied by the number of pump pistons. Flow induced pressure variation is defined as the sum of the peak-to-peak pressure resulting from these two frequencies. Also, acceleration induced pressure spikes are created when the pump valves open and close. Acceleration pressure variation for purposes of the methodology of the invention is defined as the total peak-to-peak pressure variation.
Hydraulic resonance occurs when a piping system has a hydraulic resonant frequency that is excited by forces induced by operation of a pump. Fluid hydraulic resonance is determined by analysis of the pressure waves created by the pump to determine how close the pressure response matches a true sine wave. The computer 450 is programmed to activate an alarm when the flow induced pressure variation exceeds a predetermined limit. Alternatively the computer 450 monitoring software can be programmed to trigger the reset relief valve that is operably connected and controlled by the processor.
Those skilled in the art will appreciate that the system, including pressure sensors together with the reset relief valve and its associated sensors provides information which may be used to analyze a substantial number of system operating conditions for a pump. The processor is adapted to provide a visual display 456 which may be displayed on the monitor, providing graphical display of pressure versus crankshaft position for each cylinder chamber and other parameters.
The system"s computer 450 controller, hard drive or other digital storage device and display 456 can be used for predictive analysis of the pump and component parts providing data to the operator to reveal conditions and maintenance related required tasks including but not limited to:Hidden Failure—A functional failure whose effects are not apparent to the operating crew under normal circumstances if the failure mode occurs on its own.
In conjunction with the pump, is a fully controlled and monitored pressure relief valve that is situated to set off with excessive mud flow pressures. Turning now to FIG. 5, there is a partially exploded cross sectional view of a reset relief valve showing chamber 500 and in fluid communication therewith and pressure sensor assembly 502 of the relief valve. A break is shown in FIG. 5 between the upper and lower portion of the valve



 8613371530291
8613371530291